содержание .. 8 9 10 11 ..
Практическое пособие по использованию САРП (Песков Ю.А.) - часть 10
146
не уменьшается.
Особого внимания требуют суда-попутчики, дистанция до которых монотонно
уменьшается, так как, начиная с некоторого момента, это сближение может стать опас-
ным. Лучшим маневром при этом будет уравнивание курсов и (или) скоростей, исклю-
чающее дальнейшее сближение. В "теневом" секторе, создаваемом близко идущим суд-
ном-попутчиком, может скрываться необнаруженная цель, следующая на пересечение
курса (рис. 33). Суда-попутчики требуют особого контроля при подходе к повороту (из-
гибу) СРД.
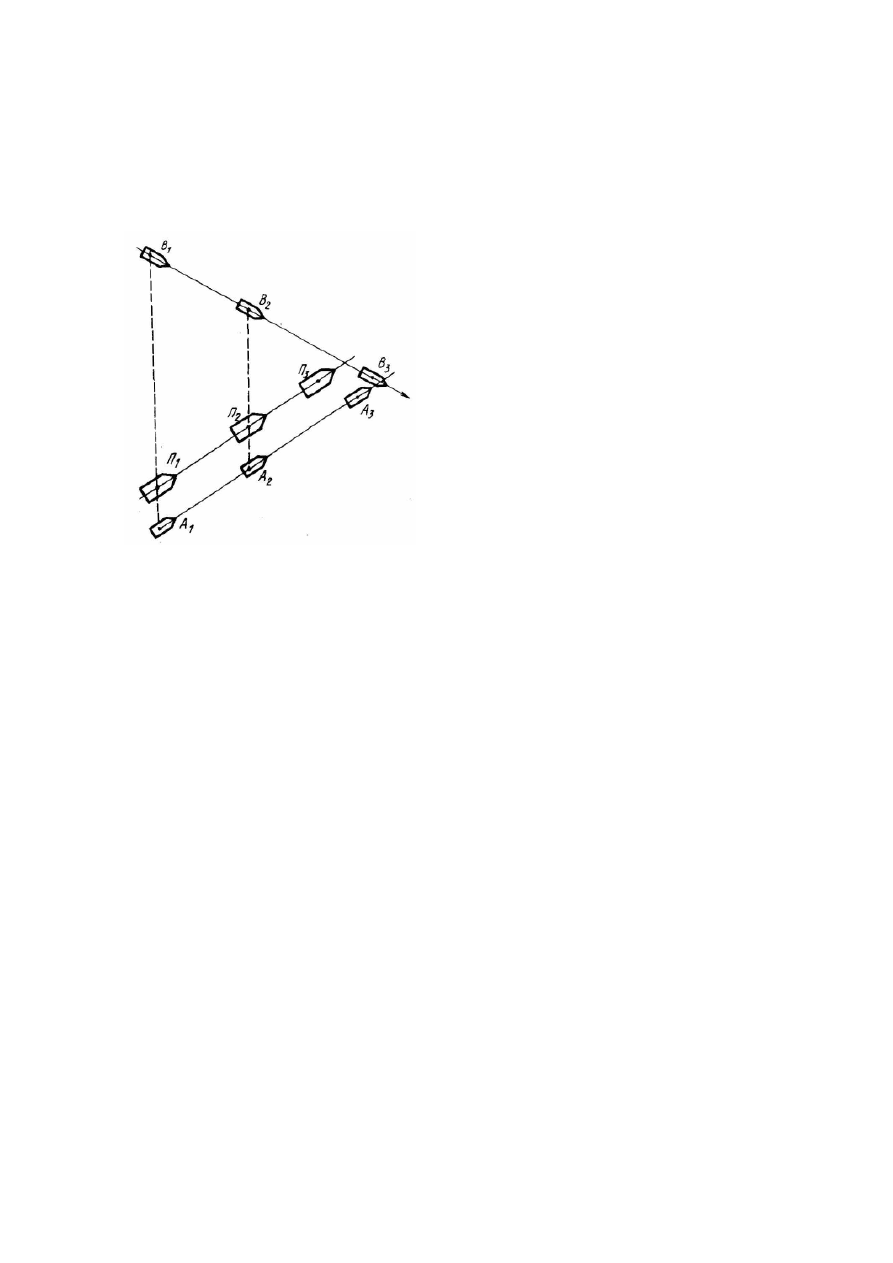
Рис. 33. Схема столкновения судна А с суд-
ном В, находившимся в "теневом"
секторе судна-попутчика П
Расходясь с группой судов, идущих параллельными встречными курсами, судово-
дитель также следит лишь за ближайшими к нему встречными судами, изменение кур-
сов которых может привести к опасной ситуации. Эхо-сигналы остальных судов начи-
нают его интересовать только в случае изменения ими курсов в сторону наблюдателя.
Поэтому в таких районах, где четко наблюдается параллельное встречное движение су-
дов, даже в условиях ограниченной видимости может осуществляться движение полным
маневренным ходом (если он соответствует скорости судопотока) и регулярное расхож-
дение судов в пределах ближней зоны около 5 кб и менее.
Суда встречного судопотока не представляют опасности, если текущее значение
предвычисленной дистанции кратчайшего сближения больше ширины зоны разделения,
а пеленг на цель уменьшается. Если каждый последующий пеленг больше предыдущего,
то одно из судов (собственное либо встречное) находится в полосе встречного движения
или пересекает полосу движения, что резко повышает степень опасности столкновения.
Судно встречного судопотока также становится опасным, если оно практически
одновременно с собственным подходит к точке поворота СРД (опасность запоздалого
или преждевременного поворота в силу навигационной ошибки, отказа рулевого устрой-
ства, намерения выйти из СРД и т.д.). Наилучшим вариантом будет такое планирование
скорости, чтобы не допустить расхождения на повороте либо сразу после поворота цели
на новый курс. Если же это невозможно, рекомендуется с использованием САРП точно
предвычислить момент поворота цели на новый курс и заранее наметить свои экстрен-
ные действия, если поворот в расчетный момент не состоится (либо начнется ранее рас-
четного). Такая методика прогнозирования действий встречного судна позволяет выиг-