содержание .. 7 8 9 10 ..
Практическое пособие по использованию САРП (Песков Ю.А.) - часть 9
130
в значительной мере компенсирует меньшую согласованность действий судов по срав-
нению с условиями визуального контакта, снижает вероятность неблагоприятного ма-
невра цели. Чем раньше будет предпринят маневр для предупреждения столкновения,
тем скорее закончится процесс расхождения.
Любой маневр, выполняемый вне визуального контакта, должен быть решитель-
ным, понятным другому судну, т. е. соответствовать МППСС-72 и хорошей морской
практике. Кроме того, он должен быть таким, чтобы не усложнить ситуацию, если суда
внезапно окажутся на виду одно у другого, т. е. таким, чтобы его можно было предпри-
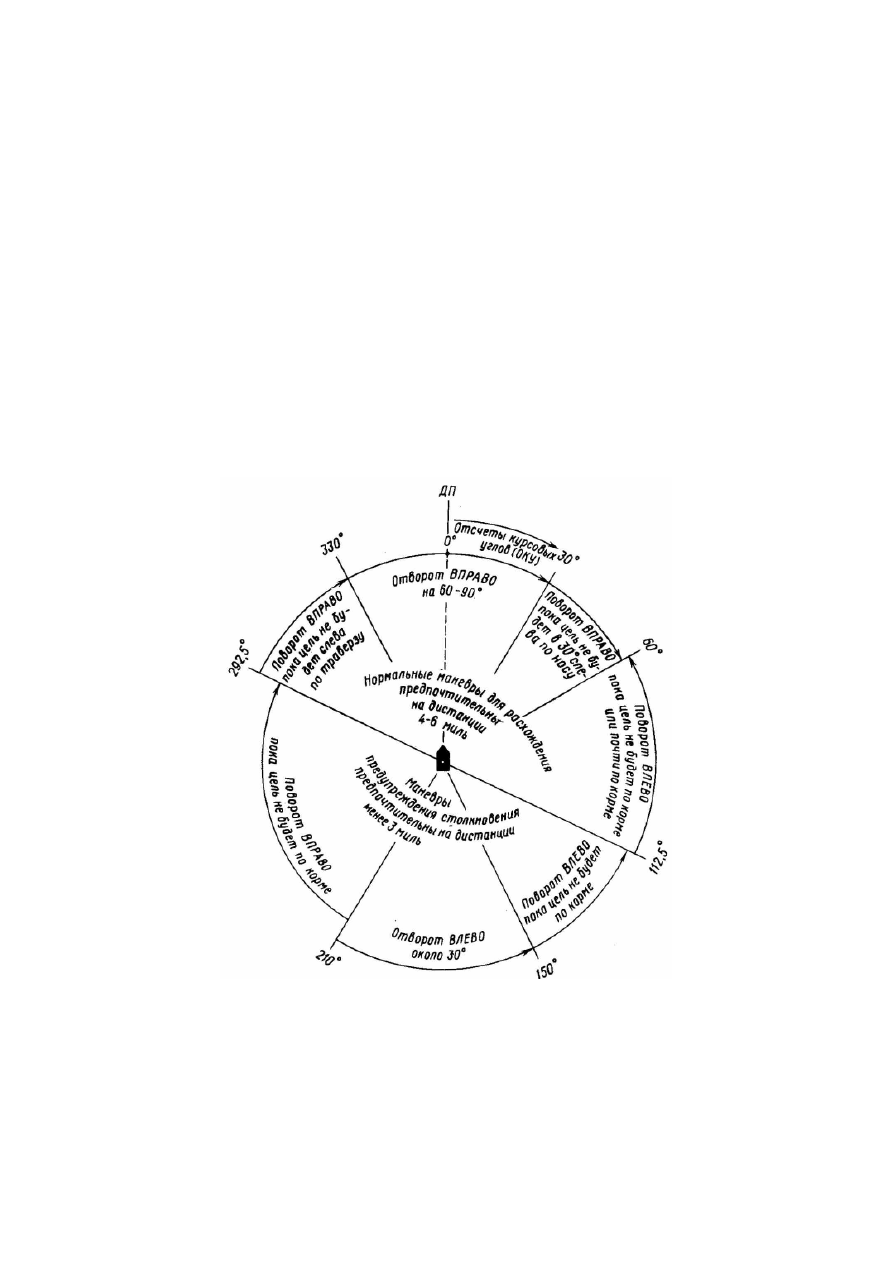
нять и при визуальном контакте. Вид маневра правилом 19 жестко не конкретизирован
за исключением некоторого ограничения стороны поворота в п. (d), однако на основе
морской практики разработана диаграмма для выбора маневра по предупреждению
столкновения при расхождении с использованием РЛС (рис. 28).
Маневр курсом в общем случае будет наиболее эффективным, т. е. рекомендуется
предотвращать возникновение ситуации чрезмерного сближения в первую очередь из-
менением курса собственного судна.
Маневр скоростью может быть рекомендован только в ситуациях, когда необходи-
мо получить дополнительное время для более полной оценки ситуации (например, при
внезапном обнаружении другого судна) или когда необходимо предотвратить столкно-
вение, избежать которого изменением курса по каким-либо причинам невозможно, или
когда изменение курса затруднено из-за наличия других судов.
Рис. 28. Диаграмма для выбора маневра расхождения при ограниченной види-
мости в открытом море на основе радиолокационной информации