содержание .. 5 6 7 8 ..
Практическое пособие по использованию САРП (Песков Ю.А.) - часть 7
98
го движения на циркуляции. При этом
s
з.м
=
ν
н
t
з.м
;
s
м
=
ν
н
t
м
;
а
=
R
ц
(1
− cos∆К);
(27)
b
=
s
м
+R
ц
sin
∆К;
t
пов
=
t
м
+R
ц
∆К/ν
н
,
где R
ц
— принятый для расчетов (т. е. введенный в САРП) радиус установившейся цир-
куляции;
∆К — заданное (задуманное) изменение курса собственного судна.
При этом точность имитации зависит от степени соответствия заложенной в САРП
модели динамике собственного судна.
Так, САРП DB-7 учитывает динамические характеристики собственного судна по-
средством так называемых системных параметров - TURN RATE, SPEED RATE,
COURSE DELAY (угловая скорость собственного судна, ...
°/мин; линейное ускорение
собственного судна, уз/мин; инерционное запаздывание начала поворота после подачи
команды на руль, с). Угловая скорость вводится в САРП по данным судовой таблицы
циркуляции. Линейное ускорение, используемое при проигрывании маневра скоростью,
рекомендуется рассчитывать по таблице маневренных характеристик как частное от де-
ления скорости малого хода на время до полной остановки. Инерционное запаздывание
начала поворота также подбирается на основании диаграмм циркуляции; при правиль-
ном подборе COURSE DELAY не должен наблюдаться разворот истинных векторов це-
лей в ту или иную сторону в ходе проигрывания маневра. Для более точного моделиро-
вания движения собственного судна при проигрывании маневра и соответственно более
точного прогнозирования складывающейся ситуации введенные системные параметры
должны максимально соответствовать маневренным характеристикам судна при данном
варианте загрузки.
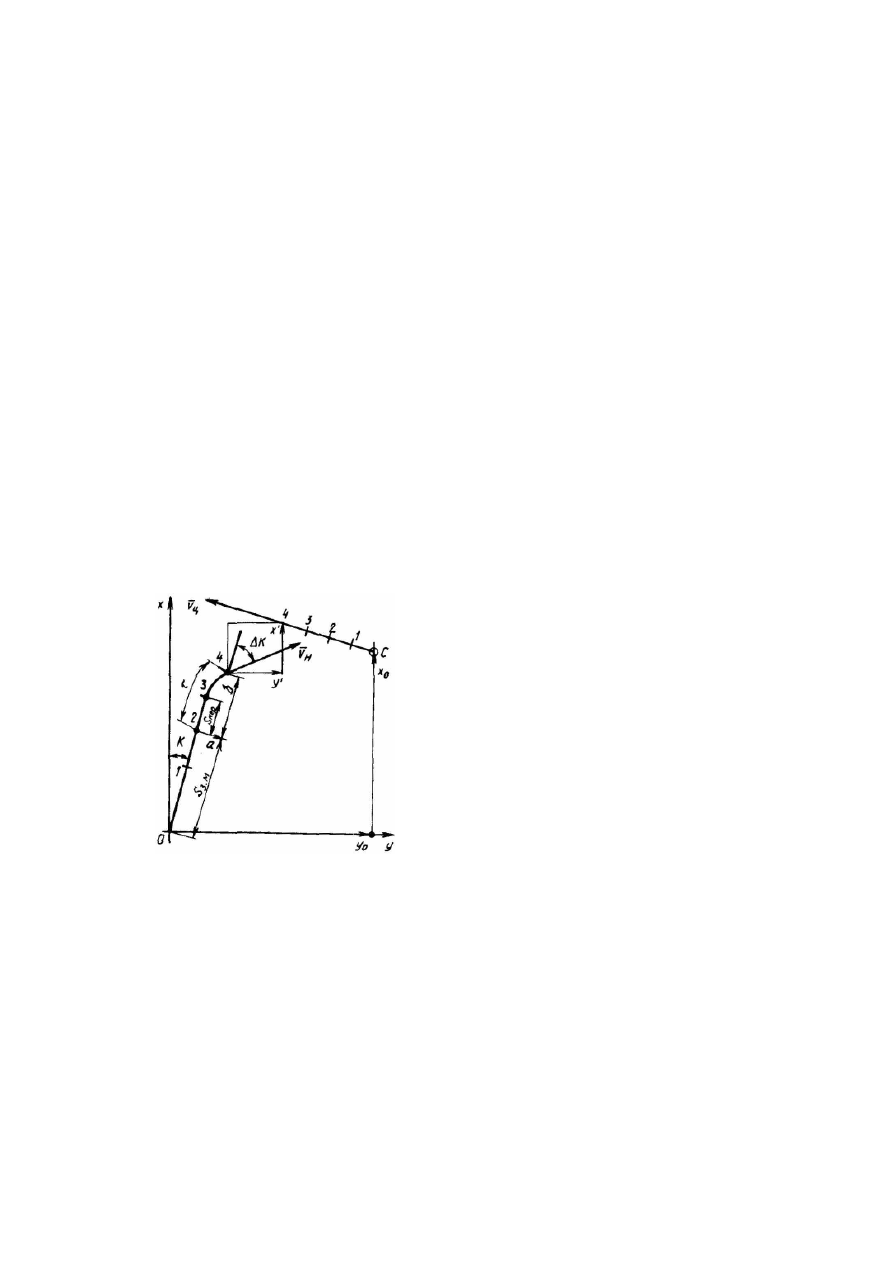
Рис. 20. Геометрические соотношения при
имитации маневра:
S
З
.
М
— перемещение своего судна за время за-
держки маневра; S
мер
— перемещение судна за
время "мертвого" промежутка t
м
при начале пово-
рота из-за его инерционности; a, b — переме-
щение судна относительно точки начала маневра
в результате выполнения маневра; Х
о
, Y
о
— отно-
сительные координаты цели С в начальный мо-
мент времени (момент начала проигрывания ма-
невра); X, Y — относительные координаты цели в
момент завершения маневра
В РЛС "RACAL-DECCA" используется упрощенная математическая модель судна,
разработанная в институте "NAUTICAL MARITIME" [1]. В модель вводят четыре пара-
метра: радиус циркуляции R
ц
, дистанция выбега S
в
, потеря скорости на повороте
∆ν/ν (%) и время изменения скорости хода с полного вперед до среднего. Каждый из
этих параметров имеет четыре градации, соответствующие разным типам судов. Нуж-
ные значения вводятся (не оперативно) посредством переключателей SC и SB платы
DSW. Таблица маневренных элементов для САРП (табл. 20) составлена по данным, по-