содержание .. 4 5 6 7 ..
Практическое пособие по использованию САРП (Песков Ю.А.) - часть 6
82
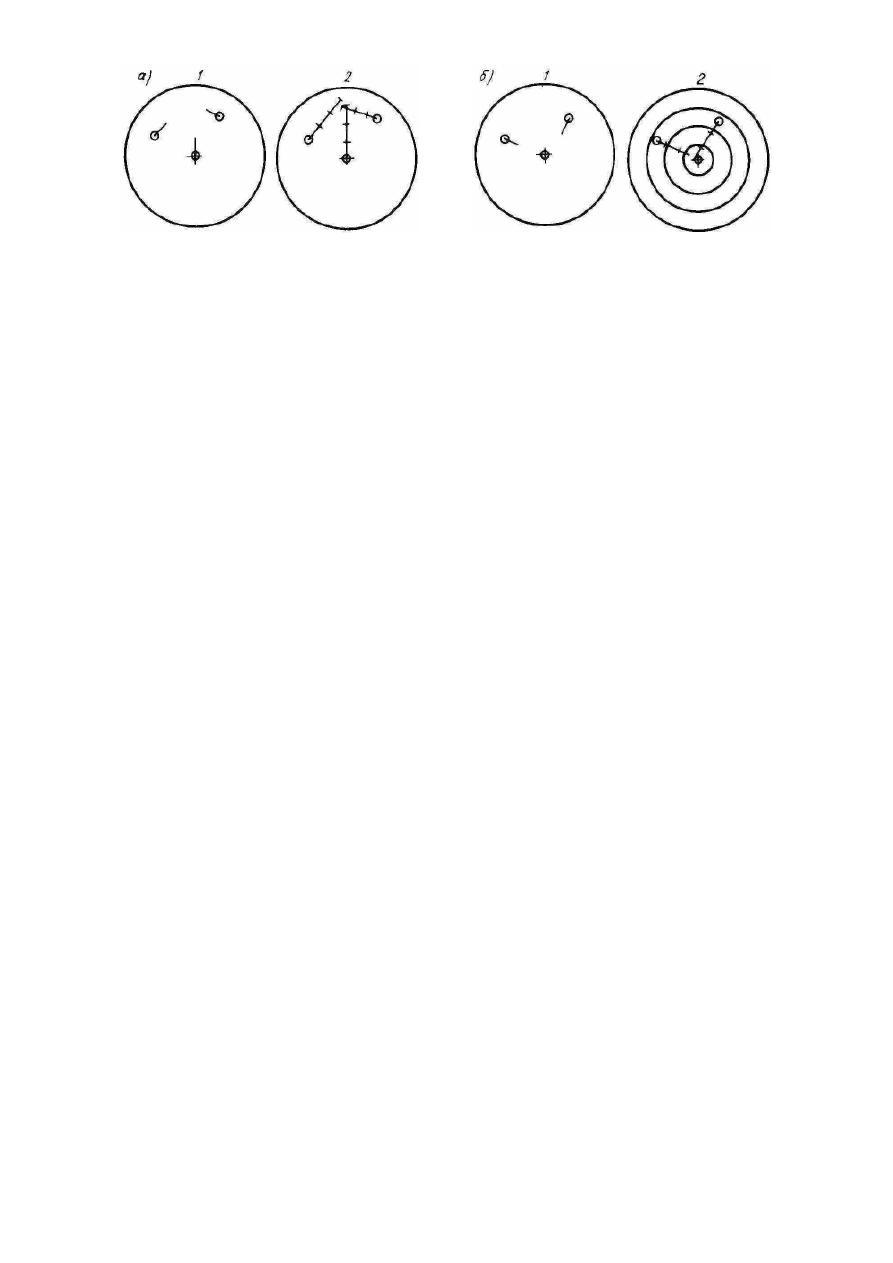
Рис. 14. Схемы прогнозирования ситуации в САРП:
а — в режиме ИВ; б — в режиме ОВ; / — при времени прогноза Т;2 — при времени прогноза 3Т
Увеличивая время вектора и наблюдая за его удлинением, можно прогнозировать
будущие положения всех целей и собственного судна при условии, что все они будут
двигаться с неизменными курсами и скоростями. Если в ходе изменения масштаба кон-
цы истинных или относительных векторов собственного судна и цели (либо других це-
лей) совпадут или почти совпадут, то эти суда идут на столкновение. Чтобы оценить, как
пройдет цель относительно собственного судна, следует удлинить ее вектор до пересе-
чения с отметкой его курса и оценить расстояния от точки пересечения до начала раз-
вертки в режиме ОД или до конца вектора в режиме ИД (рис. 15). Прогнозирование рас-
хождения двух других целей также выполняется удлинением их истинных векторов до
момента взаимного пересечения (на рис. 15, ситуация г). По взаимному пересечению
векторов можно предвидеть возможные действия других целей, что облегчает выбор
правильного маневра судна.
Для точного прогнозирования дистанции и времени кратчайшего сближения двух
выбранных целей в некоторых САРП существует специальный режим (например, "вы-
нос начала отсчета" в САРП "Океан-C" или "REF TARGET" в САРП DB-7). После выбо-
ра целей и включения режима на цифровом табло будут отображаться текущие пеленг и
дистанция с цели № 1 на цель № 2, текущие курс и скорость цели № 2, текущие экстра-
полированные значения дистанции и времени кратчайшего сближения целей № 1 и 2.
После оценки параметров взаимного сближения целей режим должен быть своевремен-
но выключен.
Если сопровождаемая цель начинает маневрировать,
вычисляемые параметры ее
движения теряют достоверность, а при резком маневре цель вообще может быть сбро-
шена с автосопровождения (с последующей потерей времени на ее повторный захват и
обработку). В этих условиях более надежную информацию дает режим отображения
"прошлых положений" цели.
Таким образом, цифровая фильтрация измеренных координат и скорости объекта,
предусматривающая сглаживание и предвычисление параметров, способствует сущест-
венному повышению точности выработки элементов ситуации и элементов движения
цели (особенно по сравнению с ручной аппроксимацией карандашных отметок на ма-
невренном планшете, разбросанных из-за погрешностей измерений). Однако в результа-
те такой процедуры происходит задержка в выдаче данных о параметрах взятых на со-
провождение целей до 3 мин.