содержание .. 3 4 5 6 ..
Практическое пособие по использованию САРП (Песков Ю.А.) - часть 5
66
онным условиям и т. д.).
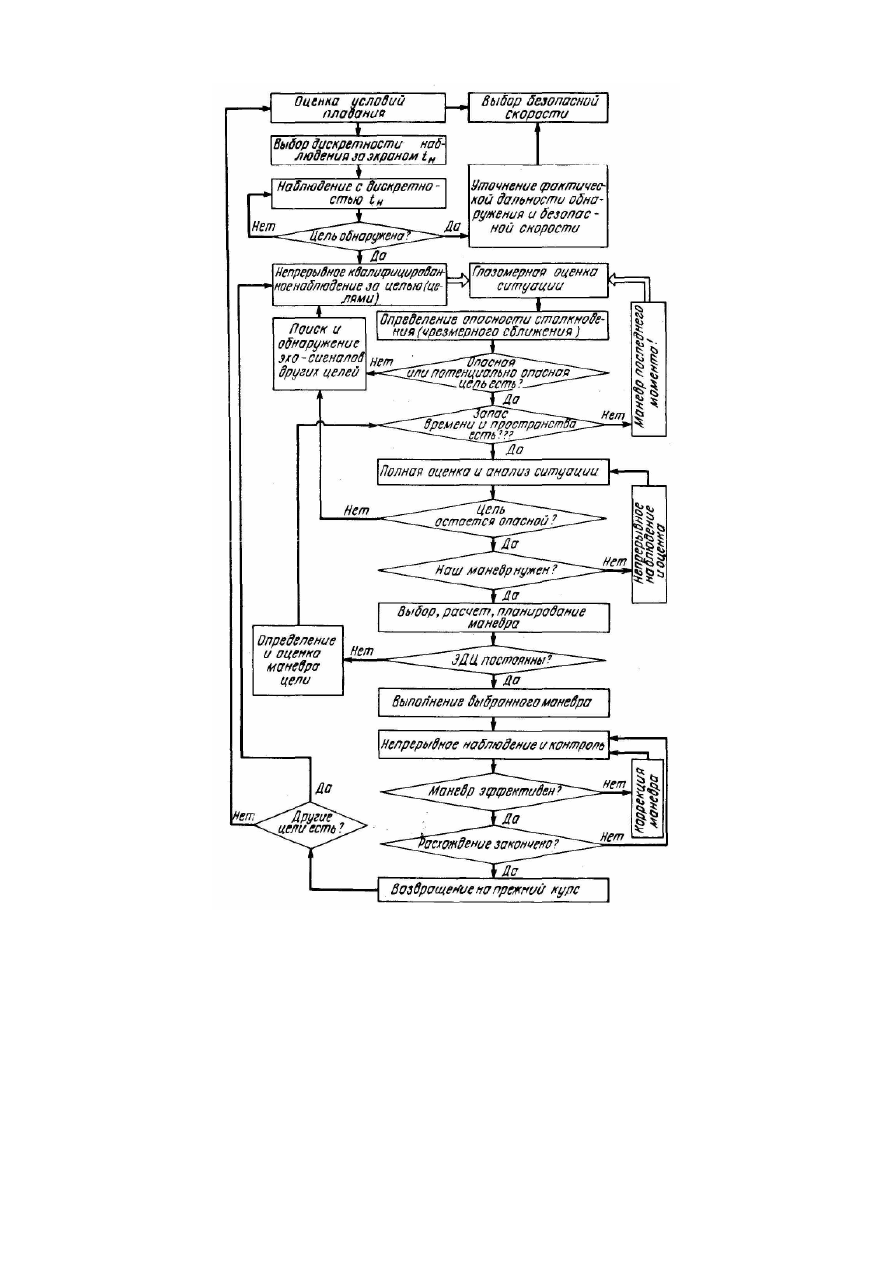
Рис. 10. Общая блок-схема решения задачи предупреждения столкновений
Главная Учебники - Разные Практическое пособие по использованию САРП (Песков Ю.А.) - 1955 год
поиск по сайту правообладателям
|
|
|
содержание .. 3 4 5 6 ..
66 онным условиям и т. д.).
Рис. 10. Общая блок-схема решения задачи предупреждения столкновений |