содержание .. 1 2 3 4 ..
Практическое пособие по использованию САРП (Песков Ю.А.) - часть 3
34
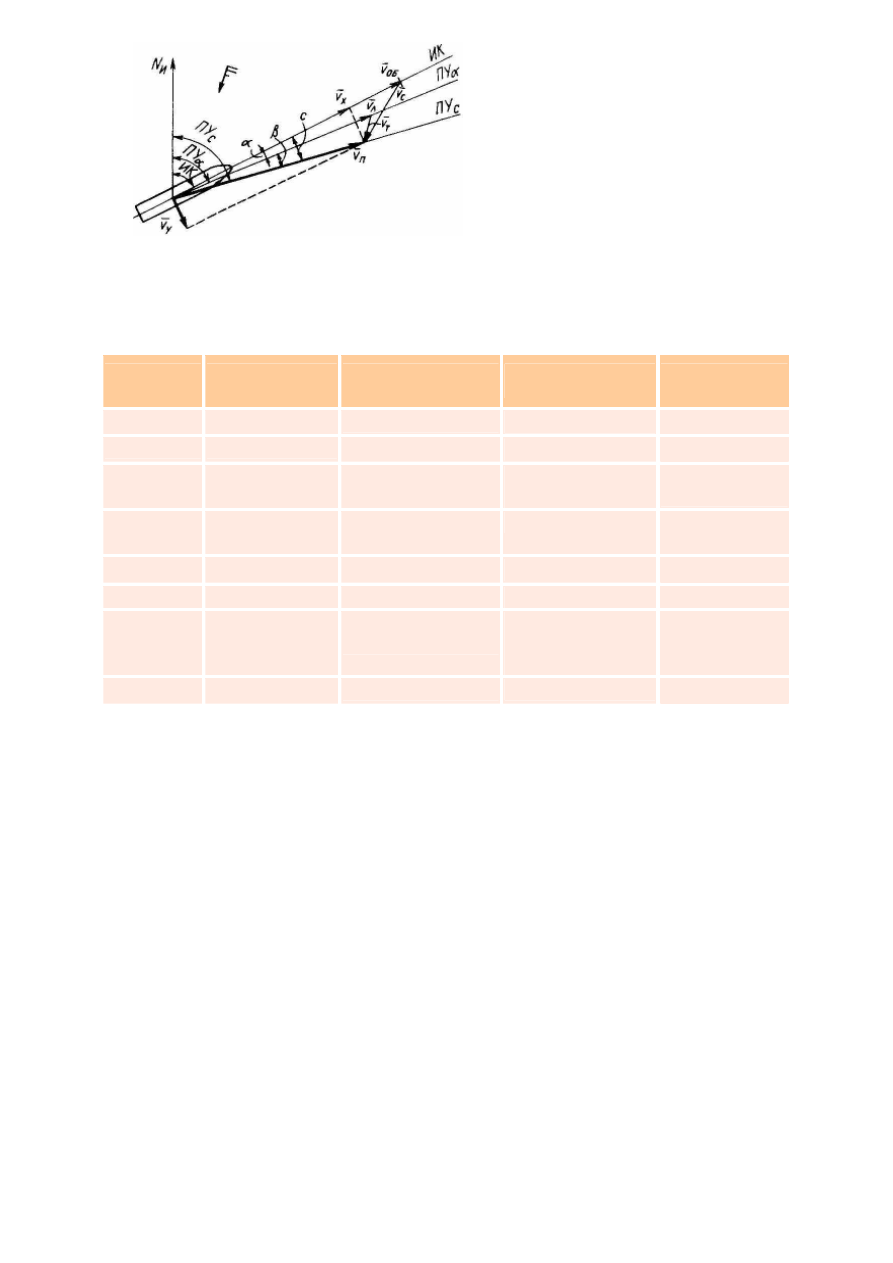
Рис. 3. Геометрия движения судна
при ветре в течении:
об
νr
— скорость по оборотам при отсутст-
вии ветра и течения (по линии ИК);
Л
νr
—
скорость по лагу относительно воды под
воздействием ветра (по линии ПУ
α
);
П
νr
— путевая скорость относительно грунта
под совместным воздействием ветра и те-
чения (по линии ПУ
С
;
X
νr
,
Y
νr
— продоль-
ная и поперечная составляющие путевой
скорости, измеряемые абсолютным лагом;
Т
νr
,
С
νr
— вектор течения и вектор сум-
марного сноса (от ветра и течения)
Таблица 16. Режимы ввода вектора скорости судна
н
νr
в САРП
Номер
варианта
Направление
движения
Скорость
Вектор суммарного
сноса
Введенный век-
тор
1
ИК (Р)
ν
об
(а)
−
О
νr
2
ГКК (А)
ν
о
(а)
−
О
νr
3
ГКК (А)
ν
x
(А)
(абсолютный лаг)
−
Не имеет реаль-
ного смысла
4
ГКК (А)
ν
x
,
ν
y
(А)
(абсолютный лаг)
−
а
νr
5
ПУ (Р)
ν
п
(Р)
−
а
νr
б
ГКК (А)
ν
о
(А)
τ
с
,
ν
с
(Р)
7
ГКК (А)
ν
о
(А)
τ
с
,
ν
с
(А)
(по АС ориенти-
ров)
а
νr
8
ПУ (А)
ν
п
(А)
−
а
νr
Примечания.
1. Р — ручной ввод данных (с периодической корректировкой после каж-
дого маневра); А — непрерывный автоматический ввод данных от гироком-
паса, лага или навигационного комплекса (НАК).
2.
ν
п
- путевая скорость судна относительно грунта от НАК;
ν
а
- абсолют-
ная скорость судна относительно грунта;
ν
о
— скорость судна относительно
воды.
Вариант ввода (
τ
С
-
ν
С
) методом автосопровождения (AUTO DRIFT) является наи-
более точным (погрешности до ± 10
÷ 30° по направлению и до ±0,1 ÷ 0,3 уз по скоро-
сти) при полной автоматизации решения задач. При этом в большинстве случаев векто-
ры целей также отображаются относительно грунта (КН H.R.3000A и др.), однако в от-
дельных моделях САРП режим AUTO DRIFT используется только для стабилизации
"электронной карты", в то время как векторы целей продолжают отображаться относи-
тельно воды, о чем судоводителю должно быть известно. В АРЛС "Океан-C" режим