Машины для съема плодов путем непосредственного
воздействия рабочих органов представляют определенный интерес для
конструкторов, создающих подобную технику.
Рабочими органами таких машин являются батареи вибрирующих стержней,
батареи гладких или винтовых -валков или сегментов, батареи вращающихся
или лопастных шпинделей, очесывающие и вибросчесывающие барабаны с
эластичными пальцами и др. Перечисленные рабочие органы могут
применяться в машинах позиционного действия или в машинах для
непрерывной уборки плодов, что особенно важно при создании
высокоэффективных плодоуборочных машин [6].
Известным преимуществом рабочих органов данного типа перед другими
является возможность резкого снижения повреждаемости плодов при
поступлении на рабочие органы (высота падения плода практически
отсутствует) и плавного спуска на транспортер или в тару. Однако это
положительное качество вступает в противоречие с повреждаемостью
плодовой древесины при вводе рабочих органов в крону дерева. По данным
ряда фирм, при создании рабочих органов со специальным эластичным
покрытием это противоречие может быть значительно сглажено. В связи с
этим работы по созданию рабочих органов для съема плодов путем
непосредственного воздействия на них широко ведутся в ряде стран с
развитым садоводством (в первую очередь в США).
В машинах с рабочими органами, непосредственно воздействующими на плоды,
стержневые рабочие органы сбивают плоды вибрирующими стержнями, валковые
или сегментные — захватывают и срывают плоды вращающимися валками или
сегментами, шпиндельные — сбивают плоды волнистыми выступами или
лопастями вращающихся шпинделей, очесывающие — снимают плоды пальцами
вращающихся барабанов. Снятые " ветвей плоды улавливают специальными
устройствами (или они падают на землю).
Экспериментальные вибросчесывающие установки
нескольких типов для съема плодов прошли испытания в США на уборке
черешни, вишни, персиков, яблок и груш. Эти установки обычно навешивают
на вильчатые погрузчики.
Вибросчесывающий рабочий орган для непрерывной уборки плодов состоит из
двух вертикально установленных барабанов с радиальными деревянными
пальцами, покрытыми эластичным материалом. Барабаны, расположенные один
над другим, при работе совершают колебания в вертикальной плоскости,
одновременно вращаясь в горизонтальной плоскости вокруг одного общего
вала. Внедрение барабанов с пальцами в крону дерева осуществляется
параллелограммным механизмом. Снятые пальцами плоды поступают в
специальный бункер и далее направляются к затаривающему устройству. С
помощью этого рабочего органа убирались также яблоки с деревьев,
сформированных в виде «плодовой стены».
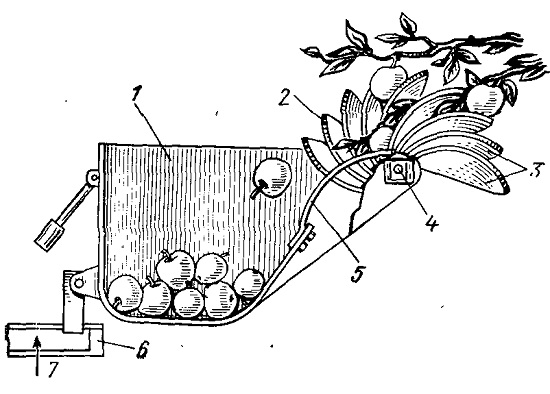
Рис. 116. Рабочий орган роторного типа для съема
плодов при непрерывном движении агрегата
В машинах для непрерывной уборки плодов в пальметных садах может быть
применен рабочий орган роторного типа (пат. США № 3 810 351, «л. 56—328
А 01 19/00, 1974 г.). Ротор 2 (рис. 116) представляет собой вал 4 с
закрепленными
на нем двухконечными лопастями 3 криволинейной
формы. Ротор установлен на выдвинутой вперед кромке бункера 1, открытого
сверху и снабженного гребенкой 5, в прорези которой при вращении
проходят лопасти. Кривизна лопастей ротора и гребенки подобрана таким
образом, что между гребенкой и входящими в нее лопастями обеспечивается
угол не менее 90°. Это исключает возможность заклинивания плодов между
лопастями и гребенкой. Бункер установлен на рамке, снабженной каретками
7, которые .могут перемещаться при помощи гидроцилиндра в направляющих
балках горизонтальной рамы 6, которая, в свою очередь, может
перемещаться в вертикальных стойках рамы энергетического средства. При
работе энергетическое средство, несущее бункер с ротором, подводится к
дереву. При движении агрегата лопасти ротора отрывают плоды и
перебрасывают их в бункер.
В нашей стране машины для съема плодов путем непосредственного
воздействия рабочих органов (Находятся в стадии исследований, которые
показывают, что такие рабочие органов представляют интерес и заслуживают
тщательного изучения. Однако следует отметить, что если отечественные
исследователи уже подошли вплотную к решению вопроса о снятии и: приеме
плодов без повреждений, то вопрос об устранении повреждения плодовой
древесины (особенно однолетних приростов) пока еще полностью не решен.
Требуются дополнительны е исследования, связанные главным образом с
изысканием эластичных материалов для покрытия рабочих органов,
соприкасающихся при работе с плодовой древесиной.
Машины портального (арочного) типа начинают разрабатывать в последнее
время для уборки плодов в пальметтных садах. В Пенсильванском
университете (США) разработаны,, изготовлены и испытаны три образца
машины портального (арочного) типа для уборки плодов с карликовых
фруктовых деревьев, сформированных на шпалере [29].
Первая машина (рис. 117, а и б) выполнена на базе высоко-клиренсного
трактора (клиренс 2,1 м) с шириной колеи 2,7 м
В качестве устройства для съема плодов,
расположенного с левой стороны машины, применены две вертикальные стойки
с пружинными пальцами длиной 350 мм, установленными На расстоянии 175 м
друг от друга в вертикальной плоскости. Соединение стоек с цапфами
обеспечивает их вращение по окружности диаметром 150 мм и позволяет
пальцам перемещаться как по вертикали, так я по горизонтали.
Вертикальные колебания пальцев с частотой 250 циклов в минуту
обеспечивают отделе-ние плодов от ветвей, а их горизонтальное движение
улучшает условия движения машины вдоль ряда без повреждения ветвей.
Улавливающая поверхность машины, состоящая из двух половин, покрытых
мягким эластичным материалом толщиной 10 мм, позволяет пропускать штамбы
деревьев при беспрерывном движении агрегата. Плоды, принятые ,на
улавливающую поверхность, скатываются на продольные транспортеры,
имеющие наклонную часть, с помощью ®оторой они загружаются в контейнеры,
расположенные на специальных вильчатых устройствах.
Изменения, внесенные в опытные образцы в 1970 и 1971 гг., были
направлены на улучшение конструкции уплотнителя штамбов, что позволило
машине двигаться вперед и назад, а также на улучшение способа загрузки
плодов и уточнение амплитудно-частотных режимов работы вибрирующего
устройства. Последнее позволило снимать с дерева 89—99% плодов. Однако
цри этом здоровые плоды составляли лишь 32%, остальные имели различные
по величине ушибы и даже проколы. Таким образом, эти образцы машин могли
быть применены только для уборки яблок на техническую -переработку.
Последующие испытания машин показали [55], что необходимо увеличить
клиренс машины (он был доведен до 3 м) « ширину между опорными
конструкциями портального трактора (она была доведена до 2,4 м), так как
даже карликовые паль-меттные сады в различных зонах произрастания имеют
неодинаковые вдоль ряда размеры.
Установок портального типа для уборки плодов в пальметтных садах
предложено много, однако они принципиально почти1 не отличаются друг от
друга. Исключение составляет предложение голландских [56] и итальянских
[35] исследователей по созданию -машины портального типа с ярусными
улавливателями плодов.
Определенный интерес представляет макетный образец
голландской портальной машины (рис. 118) фирмы JMG с гидравлическим
приводом каждого из четырех колес с возможностью поворота колес вместе
или раздельно на 90°. Портал машины имеет следующую характеристику:
колесная база 4,5 ,м, ширина колеи 3,1 м, клиренс 2,7 м. В качестве
улавливателя применены три яруса с каждой стороны. Пальцы яруса
изготовлены из силумина различной твердости. Материал пальцев был выбран
не особенно удачно, так как пальцы малой твердости при больших нагрузках
имели недопустимую остаточную деформацию, а более твердые пальцы
ломались.
На машине установлен вибратор, способный колебать дерево при непрерывном
движении агрегата. Дерево зажимается между двумя резиновыми лентами,
которые с одной и другой стороны дерева (по ходу движения агрегата)
поджимаются гидроцилиндрами двойного действия. Резиновые ленты
смонтированы на специальном цепном контуре, скорость которого
согласована со скоростью агрегата, т. е. колебание дерева происходит
практически при нулевой скорости взаимодействующих, элементов
колеблющейся системы (дерева и вибратора).
Однако не все паль-меттные сады имеют высоту деревьев 3,0—3,2 м. Имеются
свободно растущие пальметтные сады,, высота деревьев в которых достигает
4,7 м. Если создание портального трактора с клиренсом до
3.0 м еще как-то может быть обосновано, то дальнейшее увеличение
клиренса, например до 5.0 м, приведет к ухудшению устойчивости трактора,
уменьшению возможностей проезда под мостами и не может считаться
целесообразным. В связи с этим необходимо создать такую машину для
уборки плодов в пальметтных садах, которая не была бы связана с высотой
деревьев
а учитывала бы только диаметр кроны и необходимую в
связк с этим площадь улавливающей поверхности.
В пальметтных садах с деревьями большой высоты
смогут найти применение плодоуборочные машины в виде двух самоходных
улавливающих рам с той лишь разницей, что в таком агрегате должен быть
штамбовый .вибратор, оборудованный автоматическим следящим устройством,
обеапечивающим поиск, захват и колебание дерева при непрерывном движение
агрегата. Примером подобных машин может служить прототип американской
машины, созданной в 1973 г.
На рис. 119 показан общий вид одной половины машины, смонтированной на
трехколесном транспортном средстве. На раме машины установлен
автоматический вибратор, с помощью которого осуществляется поиск штамба
дерева, его захват, колебание, разжим захватного устройства с отведением
от .штамба, установка в нейтральное положение, подвод ж очередному
дереву, вновь поиск штамба и т. д. От оператора требуется лишь
поддержание зажимного устройства вибратора на определенной высоте от
поверхности почвы, остальные операции выполняются автоматически. При
этом агрегат находится в непрерывном движении, а вибратор перемещается в
противоположную сторону за счет скольжения (перемещения) вдоль двух
горизонтально расположенных параллельных труб (направляющих вибратора).
Направляющие вибратора закреплены в свою очередь на специальной каретке,
имеющей возможность перемещаться как в горизонтальной, так и в
вертикальной плоскостях.
Испытания машины показали, что с ее помощью можно увеличить
производительность труда. Однако при испытаниях одновременно
установлено, что необходимо создать надежное устройство, обеспечивающее
плотную стыковку двух половин плодоуборочного агрегата.
Машины для непрерывной уборки плодов в
пальметтных садах, способные пропускать через себя штамбы плодовых
деревьев при гарантированном их уплотнении с целью исключения потерь
плодов на землю в месте стыка отдельных половин улавливателей, идущих по
соседним междурядьям, разрабатываются во многих странах. Так, патентом
США (№ 3 370 409, жл. 56—328, 1968 г) предусмотрено устройство для
прохода сквозь ряд плодовых деревьев, смонтированное на двух автономных
платформах (улавливателях), идущих по соседним междурядьям. При этом
один из улавливателей является ведущим (он оборудован движителем), а
другой— ведомым. Улавливатели скреплены между собой специальными
соединительными звеньями, имеющими возможность пропускать через себя
штамбы плодовых деревьев (последовательно открываясь и закрываясь). При
этом оба улавливателя все время остаются в сомкнутом положении. Такой
способ прохода улавливателей по саду позволяет создать беспортальное
разъемное энергетическое средство, которое может быть .применено для
уборки плодов в пальметтных садах с высотой деревьев 4,7 ,м.
Соединительное звено представляет собой прикрепленный ч улавливателям
каркас, состоящий из двух пар направляющих элементов дугообразной,
формы. Между соответствующими парами элементов остается зазор (окно) для
пропуска штамба дерева. Цары направляющих элементов соединяются
перемещающейся в них по периметру задвижкой, которая приводится в
действие от гидромотора, имеющего на валу шестерню. Зубья шестерни
входят в пазы задвижки и при вращении передвигают ее.
Штамб дерева пропускается сквозь соединительное звено следующим образом.
При первоначальном положении в сцепленном состоянии находятся задние
звенья соответствующих пар направляющих элементов. Штамб проходит через
зазор (окно) первого кольца. Срабатывает чувствительный элемент
(предположительно, механический щуп или фотоэлектрический датчик) сигнал
от которого приходит на гидромотор, приводящий в движение задвижку.
Задвижка закрывает переднее окно, а штамб дерева, через открывшееся
заднее окно, выходит из первого кольца и соответственно из зоны
срабатывания чувствительного элемента. Гидромотор возвращает задвижку в
первоначальное положение. Штамб дерева входит через переднее окно
второго кольца соединительного звена, которое срабатывает так же, как и
первое кольцо соединительного звена.