содержание .. 39 40 41 42 43 44 45 46 47 48 49
КОНСТРУКЦИИ УЛАВЛИВАЮЩИХ УСТРОЙСТВ ДЛЯ УБОРКИ ПЛОДОВ - ЧАСТЬ 4
Определенный интерес представляет собой макет
машины, разработанный, построенный и испытанный в Дании Ове Расмуссеном
[32].
Принцип действия машины (рис. 91) заключается в том, что опадающие при
колебании дерева плоды окружаются пластмассовыми шариками. Машина
портальная, что позволяет проходить машине над деревом и заключать его в
закрытый ящик, образованный из прозрачных стенок машины, дна со
специальными продольными транспортерами 8 и резиновыми уплотнителями 9
деревьев, крышки 10, выполненной в виде бункера с открывающимся днищем,
и двери 7 с уплотнительными элементами. В бункере размещается несколько
кубических метров легких пластмассовых шариков 1 размером с теннисный
шарик. При открывании днища крышки шарики опускаются вниз и
обволакивают все дерево. Затем днище закрывается, дереву сообщают колебания и плоды, оторвавшиеся от ветвей, между пластмассовыми шариками мягко опускаются вниз. После этого днище бункера вновь открывается и большая часть пластмассовых шариков с помощью воздушного потока, создаваемого
вентилятором 5, через левый раструб 6 поступает в
бункер. Плоды же и часть оставшихся в ящике шариков продольными
транспортерам, 8, через узкую щель подаются на поперечный
транспортер 4 и далее погрузочным транспортером 2 в контейнер 3. В
момент падения пластмассовых шариков с продольных транспортеров на
поперечный транспортер 4 происходит окончательное засасывание всех
остальных шариков через правый раструб и подача их в бункер машины.
Преимуществом машины Расмуссена является возможность уборки нежных
плодов без повреждений. Однако ее широкое применение возможно только при
комплексном решении ряда агрономических (специальное формирование
небольших по размеру деревьев и др.) и инженерных задач, связанных
главным образом с созданием вакуумной камеры для деревьев.
Для устранения повреждения плодов о ветви Корнельским университетом в
США разработана оригинальная конструкция многоярусного улавливателя
{45]. Улавливатель имеет два яруса, которые при уборке плодов внедряются
в крону дерева. Приемная поверхность обоих ярусов состоит из надувных
элементов длиной 2,4 м каждый, позволяющих мягко принимать плоды при
падении. В улавливателе предусмотрен безударный спуск плодов,
специальные подаватели плодов с обоих ярусов, на общее укладочное
устройство с эластичными рабочими органами и автоматическим устройством,
обеспечивающим строго рядовую укладку плодов в контейнер.
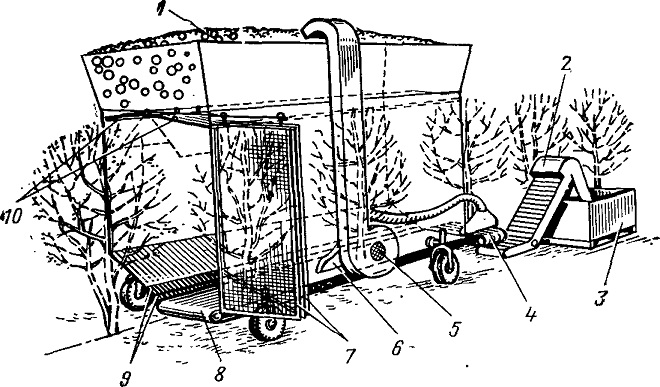
Рис. 91. Схема машины конструкции Расмуссена (Дания) для уборки плодов в пальметтных садах
Механизмы улавливателя смонтированы на самоходном шасси со всеми
ведущими и управляемыми колесами и шарнирно сочлененной рамой с
гидроуправлением. Улавливатель перемещается по междурядью, а затем,
после поворота колес на 90°, сближается с обрабатываемым деревом. Все
механизмы и колеса приводятся от индивидуальных гидродвигателей,
связанных с единым насосом подачей 265 л/мин. Насос приводят в действие
от автомобильного двигателя внутреннего сгорания. Масса машины 7000 кг,
габаритные размеры: длина 9760, ширина 3360, высота 2800 мм.
Испытания улавливателя показали, что время обработки одного дерева
составляет около 2 мин, поврежденных плодов о ветви — значительно
меньше, чем при использовании традиционных улавливающих поверхностей,
устанавливаемых под деревом.
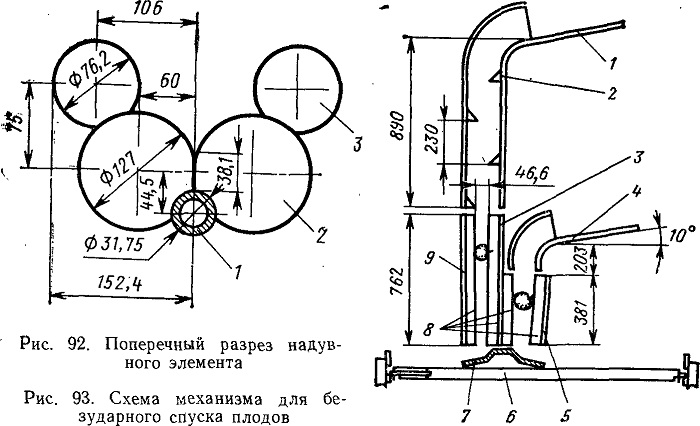
Как видно из поперечного разреза надувного элемента улавливателя (рис.
92), он состоит из основания 1, изготовленного из жесткой
полихлорвиниловой трубки диаметром 31,75 мм, большого 2 и малого 3
надувных элементов. К основанию приварены большие баллоны диаметром 127
мм из полиуретановой пленки толщиной 0,18 мм, к которым в свою очередь
приварены малые баллоны диаметрам 76,2 мм из такого же материала. Через
отверстия диаметром 9,5 мм из основания нагнетается воздух в баллоны под
давлением 152 мм рт. ст., в результате чего элемент принимает форму
желоба шириной 122 мм, по которому плоды скатываются в боковой спуск.
Для облегчения проникновения в крону дерева полихлорвиниловая трубка
(основание надувного элемента) оснащена металлическим наконечником с
деревянным обтекателем.
Надувные элементы расположены в два яруса. Верхний содержит 14
элементов, нижний 15. Расстояние между ярусами 1070 мм. Каждый ярус и
надувные элементы наклонены на 12° от штамба дерева в сторону
междурядья. В самом низу под кроной дерева расположен еще один ярус
улавливателя, состоящий из полимерных трубок и расположенных над ними
амортизирующих лент.
Каждый ярус имеет свой приемник плодов, изготовленный из гофрированных
стеклопластиковых панелей с уклоном для скатывания плодов в спуск.
Безударный спуск плодов с двух верхних ярусов осуществляется с помощью
специального механизма (по терминологии специалистов США «граббера»).
Его принцип действия осно* ванна переменном торможении и опускании
плодов.
Из схемы механизма для безударного спуска (рис. 93) видно, что он
предназначен для одновременного приема плодов с двух верхних ярусов и
состоит из двух неподвижных фанерных
панелей 5 и 9 и одной подвижной панели 3, покрытых
внутри эластичным материалом 8. При этом нижний зазор между панелями
несколько меньше верхнего.
Плоды окатываются с надувных элементов улавливателя на направители 1 и 4
из полиуретана и поступают в межпанельное пространство. При этом плоды
верхнего яруса проходят желоб, в котором установлены клиновые дефлекторы
2. Затем, если размер плода невелик, плод проходит через зазор
между эластичными материалами панелей. Обычно этого
не бывает, так как зазор между эластичными материалами устанавливается
меньше среднего размера убираемых плодов.
Одновременно с началом поступления плодов в межпанельное пространство
включается в работу кривошипно-шатунный механизм, приводящий в
возвратно-поступательное движение среднюю панель. В процессе колебаний
панели расстояние между эластичными материалами изменяется и плоды
постепенно проваливаются вниз до выхода из панели на нижний пластинчатый
дефлектор 7, с которого они поступают на главный транспортер 6, «уда с
помощью специального устройства (подавателя) подаются также плоды с
нижнего яруса. Улавливатель уснащен четырьмя спусками шириной по
915 мм каждый. Изменяя частоту и амплитуду колебаний подвижной панели,
можно изменять скорость продвижения плодов по «пуску.
Подаватель плодов с нижнего яруса (рис. 94) состоит из транспортера 2 с мягкими роликами, пенополиуретановых
вальцов 1, дефлектора 5 и пенополиуретановых
накладок 4.
Плоды с роликового транспортера 2 поступают на пенополиуретановые
накладки 4 толщиной 38 мм и 'Перекатываются по ним под действием
.вальцов 1 диаметром 114 мм, изготовленных из того же эластичного
.материала. Далее плоды поступают на полотно главного транспортера 3
шириной 1016 мм. Полотно главного транспортера состоит из пары
бесконечных втулочно-роликовых цепей, покрытых пенополиуретаном толщиной
12 мм.
Главный транспортер выгружает плоды в специальное укладочное устройство
— наполнитель контейнера (рис.
95), в котором плоды укладываются послойно, правильными рядами.
Устройство состоит из главного транспортера 5, гребенчатого направителя
4, микровыключателя 3, подающего барабана 2, спуска 1, нижнего
амортизатора-направителя 6, механизма 7 подачи и перемещения контейнера
влево, концевого микровыключателя 8, соединительного звена 9 и механизма
10 возврата контейнера вправо.
Сплошной ряд плодов накапливается в четырехлопастном подающем барабане
2, вдоль которого расположены в ряд датчики заполнения в виде нескольких
микровыключателей 3 с последовательным соединением. При заполнении всех
мест в барабане микровыключатели замыкают цепь, благодаря чему
включается электромагнитная муфта привода, поворачивая барабан на
четверть оборота. В момент поворота барабана плоды поступают в спуск 1,
устройство которого аналогично описанному с той лишь разницей, что
колебательное движение получают обе панели спуска.
У нижнего конца спуска находится амортизатор-направл-тель 6,
осуществляющий правильную укладку плодов в ряд, примыкающий к .ранее
уложенному. Поступлению каждого ряда плодов соответствует синхронное
перемещение контейнера влево, осуществляемое с помощью специального
механизма 7. После укладки одного слоя контейнер возвращается назад при
помощи механизма 10 с концевым микровыключателем 3.
Одновременно с включением реверсивного хода контейнера включается гидромеханизм, опускающий контейнер вниз на высоту одного слоя плодов. Включение транспортера для вывода заполненного контейнера и установки вместо него порожнего осуществляется вручную.
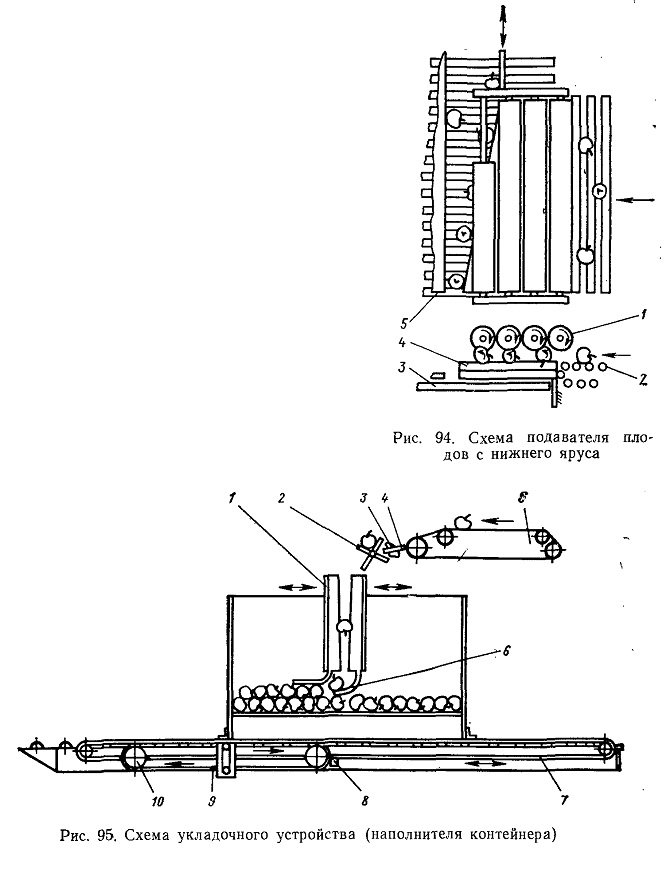
Рис. 94. Схема подавателя плодов с нижнего яруса
Рис. 95. Схема укладочного устройства (наполнителя контейнера)
содержание .. 39 40 41 42 43 44 45 46 47 48 49