содержание .. 20 21 22 23 24 25 26 27 28 29 30 ..
Глава IV.
ЭЛЕМЕНТЫ ТЕОРИИ И РАСЧЕТА ВИБРАЦИОННЫХ
ПЛОДОУБОРОЧНЫХ МАШИН
Несмотря на определенные преимущества многоместных плодоуборочных
платформ и ручных вибраторов по сравнению с традиционным способом уборки
плодов при помощи ручного садового инвентаря, их применение не может
полностью решить проблему уборки (особенно на техническую переработку),
так как при использовании платформ и ручных вибраторов все равно
требуется большое количество ручного труда. В связи с этим дальнейшим
развитием технических средств для механизации уборочных работ в садах
явилось создание вибрационных плодоуборочных машин, которые обладают
высокой производительностью при небольшом количестве обслуживающего
персонала.
Все вибрационные плодоуборочные машины с законченным технологическим
циклом имеют в своем составе устройства для колебаний деревьев
(вибраторы) и устройства для улавливания плодов.
Технологический процесс работы плодоуборочной машины заключается в
следующем. Стрела, закрепленная на тракторе или на кронштейне,
специальным захватом (или захватом на штамбовом вибраторе) обхватывает
ветвь (штамб) дерева. Затем от вибратора ветви (штамбу) дерева
сообщаются колебания, в результате которых плод отделяется от ветви в
месте наименьшей связи плодоножки. Снятые с дерева плоды собирают в
специальное улавливающее приспособление, заранее установленное под
деревом.
Рассматривая механизм отрыва плода, схематически представим дерево с
плодами так, как показано на рис. 41. Ствол дерева захватывают в точке С
и сообщают ему колебания от генератора колебаний Г. Колебания
распространяются по ветвям дерева и доходят до точки А подвеса плодов,
оптимальные режимы колебания которой необходимо установить
теоретическими исследованиями и подтвердить экспериментально.
В связи с этим вопросы, подлежащие рассмотрению, могут быть
сформулированы следующим образом:
1) установление закономерностей передачи частоты и
амплитуды генератора колебаний на дерево;
2) установление закономерностей распространения волн в стволе и ветвях;
3) установление закона движения места подвеса плода.
В физической модели колебательной системы (рис. 41) приняты такие
допущеня: элементы L, L' и L" соединены между собой жестко и обладают
определенной упругостью; материал
элементов однороден; в точке С к системе приложена внешняя возмущающая
сила F(t) =F sin vt.
Колебания, сообщаемые генератором элементу L, распространяются вдоль
элементов L' и L". Источник колебаний воздействует на систему таким
образом, что окончание (точка А) последнего элемента совершает колебания
в горизонтальной плоскости. Эта гипотеза подтверждена результатами
скоростной киносъемки (кинооператор
И. А. Кост), проведенной при механизированной уборке различных плодов.
Окончание системы является точкой А подвеса плода, поэтому последняя
также совершает колебания в горизонтальной плоскости.
Полагая соединение в точке А шарнирным и пренебрегая массой плодоножки,
при математическом анализе отрыва плода применим уравнение движения
простого физического маятника с горизонтальным синусоидальным
перемещением точки подвеса.
Здесь же отметим, что вследствие переменного по длине сечения элементов
L, L' и L" их жесткость также переменна (раньше принято допущение, что
материал элементов однороден). В связи с этим амплитуда и частота
колебаний точки подвеса А могут отличаться от соответствующих параметров
колебаний точки С. Передаточные отношения могут быть определены
экспериментальным путем, например с помощью скоростной киносъемки
процесса распространения волн в стволе и ветвях.
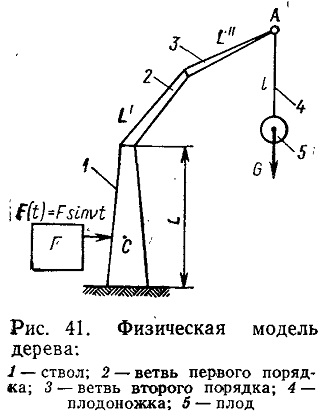
Рис. 41. Физическая модель дерева:
1 — ствол; 2 — ветвь первого порядка; 3 — ветвь второго порядка; 4 —
плодоножка; 5 — плод
содержание .. 20 21 22 23 24 25 26 27 28 29 30 ..