содержание .. 10 11 12
Практическое пособие по использованию САРП (Песков Ю.А.) - часть 12
178
Если принято решение уступить дорогу, необходимо уйти, насколько это практи-
чески возможно, с пути другого судна с соответствующей информацией о своих дейст-
виях по УКВ.
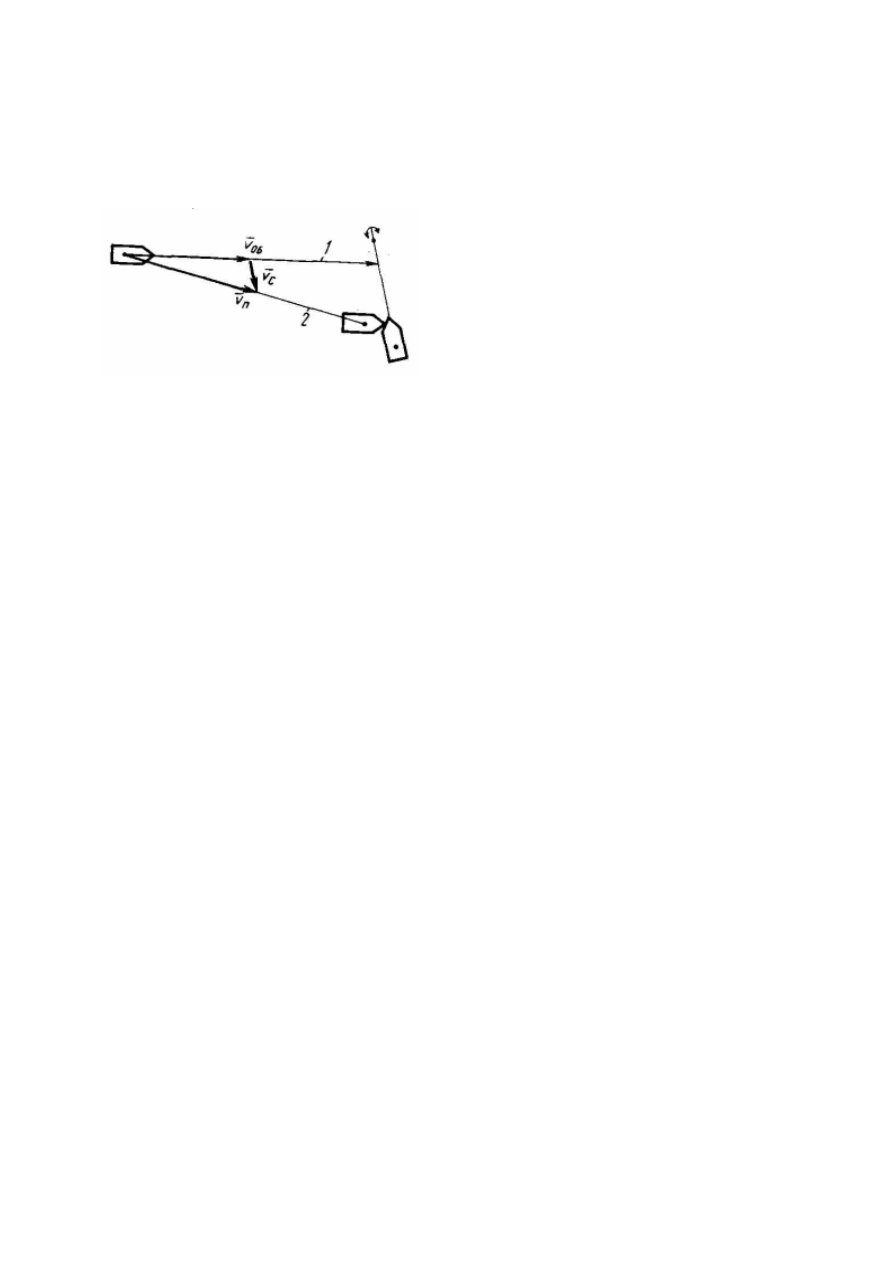
При плавании в портовых водах и на подходах к ним нередки столкновения с су-
дами, стоящими на якоре. Одной из основных причин таких столкновений (при свое-
временном обнаружении) является неучет или неверный учет влияния гидрометеороло-
гических факторов - ветра и течения, особенно при малых скоростях и в балласте (рис.
37).
Рис. 37.
Схема сноса судна, создающего
опасность его навала на другое
судно: 1 — желаемое направление
движения (направление ДП судна);
2 — фактическое перемещение
судна относительно грунта под
действием
вектора
суммарного
сноса
c
νr
Вход на стесненный рейд при сильном течении или сильном ветре (особенно в бал-
ласте) - очень сложная операция, требующая не только высокого профессионального
искусства по управлению судном, но и тщательного выбора курсов и скоростей, систе-
матического наблюдения за характером движения собственного судна (особенно при
подходе к судну, стоящему на якоре), определения направления и скорости сноса собст-
венного судна в сторону другого судна.
В этой ситуации САРП позволяет быстро и эффективно контролировать пеленг и
дистанцию проходящего судна, вектор сноса. Выдаваемые САРП значения Д
кр
и
t
кр
бу-
дут надежны только при длительном плавании постоянным курсом с постоянной скоро-
стью.
Когда одно судно отдало якорь на общепризнанной якорной стоянке, несет огни и
подает звуковые сигналы, требуемые Правилами, другое судно, находящееся на ходу,
при столкновении с ним почти наверняка признается полностью виновным. Если судно
отдало якорь на фарватере или в районе, через который идут суда или который не явля-
ется признанной якорной стоянкой, то отступление от Правил плавания и хорошей мор-
ской практики, возможно, позволяет возложить на него часть вины за столкновение. Тем
не менее, независимо от того, правильно или неправильно стоит судно на якоре, обя-
занность судна на ходу избегать, насколько это возможно и безопасно для него, каких
бы то ни было столкновений.
При съемке судна с якоря движение его относительно воды может быть таким мед-
ленным, что заметить его вряд ли возможно. Признаками начала движения могут быть
спуск якорного шара в момент, когда якорь оторвется от грунта, днем, выключение па-
лубного освещения и включение ходовых огней ночью. Однако эти признаки являются
косвенными, и если на снимающемся судне не спустят якорный шар в момент отрыва
якоря от грунта, то другие суда лишатся возможности обнаружить начало его движения.
Ситуация еще более усложняется при радиолокационном наблюдении в условиях
ограниченной видимости, в особенности если судно, снимающееся с якоря, набирает
ход с одновременным плавным разворотом на желаемый курс. Во-первых, судно, дви-
жущееся с малой скоростью, трудно выделить среди эхо-сигналов других судов, стоя-