содержание .. 39 40 41 42 43 44 45 46 47 48 49 50 ..
ЭЛЕКТРИЧЕСКИЙ ПРИВОД ГРУЗОПОДЪЕМНЫХ МАШИН
Свойства электропривода с двигателем постоянного тока привода грузоподъёмных машин
Свойства электропривода с двигателем постоянного тока зависят от способа подключения обмоток возбуждения. Для привода грузоподъемных машин применяют двигатели параллельного возбуждения (шунтовые), двигатели последовательного возбуждения (сериесные) и двигатели смешанного возбуждения (компаундные).
Регулирование скорости двигателя параллельного
возбуждения производится либо изменением сопротивления в цепи якоря,
либо изменением сопротивления в цепи обмотки возбуждения, либо
изменением напряжения, подводимого к двигателю. Первые два способа
регулирования применяют при питании двигателя от общей сети постоянного
тока, а последний — при питании двигателя от отдельного источника
постоянного тока с регулируемым напряжением, например от отдельного
генератора.
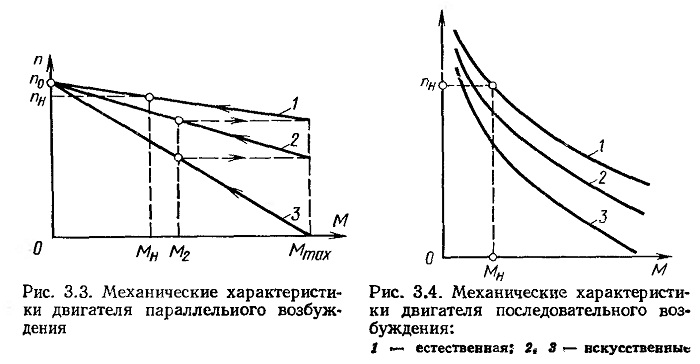
На рис. 3.3 приведено семейство механических характеристик шунтовых
двигателей при различных сопротивлениях в цепи якоря и постоянном
максимальном возбуждении двигателя. Жесткость механических характеристик
понижается с увеличением сопротивления в якорной цепи. При полностью
введенном сопротивлении момент изменяется по искусственной
характеристике 3, при частично введенном сопротивлении — по
характеристике 2, при полностью выведенном сопротивлении — по
характеристике 1, которую называют естественной. При пуске двигателя его
момент изменяется от максимального значения Мтах до значения М.2,, при
котором происходит переключение пускового реостата.
Двигатели параллельного возбуждения допускают применение всех тормозных
режимов работы: генераторного с рекуперацией электроэнергии в сеть,
противовключения и динамического торможения. В режиме динамического
торможения можно снизить скорость механизма до весьма малого значения,
что уменьшает работу механического тормоза, в функции которого входит
при этом только окончательная остановка механизма и аварийное торможение
при внезапном перерыве в подаче электроэнергии. Двигатели постоянного
тока с параллельным возбуждением чаще используют для привода механизмов
передвижения и поворота, а также для тех механизмов подъема и привода
лебедок, в которых недопустимы значительные колебания скорости.
При питании двигателя параллельного возбуждения от специального
генератора постоянного тока образуется так называемая система
«генератор—двигатель» (система Г—Д). Эта система обладает наилучшими
регулировочными свойствами по сравнению с другими системами
электропривода, но имеет весьма большую стоимость при изготовлении.
Применение системы Г—Д обеспечивает очень плавное регулирование скорости
в пределах 1 : 10, а при использовании специальных возбудителей
(например, электромашинных или магнитных усилителей) предел
регулирования скорости может быть увеличен до 1 : 120. Поэтому привод
Г—Д предназначен для ответственных крановых механизмов и скоростных
лифтов, для которых требуется широкое и частое регулирование скорости.
Двигатели последовательного возбуждения приводятся в действие с
помощью пусковых резисторов в цепи якоря так, что по мере увеличения
частоты вращения поочередно выводятся секции реостата. Особенностью
сериесных двигателей является мягкость их естественной и искусственной
механических характеристик (рис. 3.4), причем эта мягкость увеличивается
при уменьшении момента. Чем
большее сопротивление введено последовательно с
якорем, тем ниже расположена характеристика.
Двигатели последовательного возбуждения чаще используют для привода
механизмов подъема кранов. Так как масса поднимаемых грузов изменяется в
широких пределах, подъем грузов большой массы механизмом с двигателем
последовательного возбуждения происходит с меньшей скоростью, а подъем
грузов малой массы — с большей скоростью. Это способствует увеличению
производительности грузоподъемных машин. Ввиду того, что частота
вращения двигателя (см. рис. 3.4) последовательного возбуждения при
уменьшении нагрузки возрастает, механизм с таким двигателем должен
всегда иметь некоторую нагрузку во избежание достижения двигателем
недопустимо высокой частоты вращения. Двигатели последовательного
возбуждения могут работать во всех тормозных режимах: генераторном,
противовключения и динамического торможения.
Свойства двигателей смешанного возбуждения являются промежуточными между
двигателями параллельного и последовательного возбуждения. Обычно
скорость частоты вращения регулируют изменением внешнего сопротивления в
цепи якоря. Двигатели смешанного возбуждения предназначены для привода
механизмов передвижения и поворота кранов.
содержание .. 39 40 41 42 43 44 45 46 47 48 49 50 ..