содержание .. 17 18 19 20 ..
Emerson Уровнемер 5300 волноводный радарный. Руководство по эксплуатации (2018 год) - часть 19

Уровнемер 5300 с преобразователем из HART® в Modbus®
4. Нажать кнопку Modbus Setup (настройка Modbus).
5. В окне Modbus Setup (настройка Modbus) выбрать протокол Modbus и тип желаемого адреса Modbus.
6. Ввести скорость в бодах, контроль четности и стоповые биты, затем нажать OK.
Также можно ввести задаваемое пользователем сообщение Modbus (Modbus Message) в области Modbus
String (строка Modbus).
Подробнее о каждом протоколе Modbus см. в отдельных разделах.
J.8.2
Использование полевого коммуникатора для изменения
параметров связи
Примечание
Для изменения параметров связи Modbus уровнемер 5300 должен использовать HART-адрес 1, адрес по
умолчанию.
Примечание
После изменения параметров связи следует отключить полевой коммуникатор и выждать по крайней
мере 60 секунд для того, чтобы изменения вступили в силу.
Параметры связи Modbus можно изменить, введя текстовую строку в параметре HART Message
(сообщение HART). Более подробную информацию о каждом протоколе Modbus и требуемых строках см.
в следующих далее разделах.
При использовании полевого коммуникатора область сообщения доступна по команде HART [2,2,1] с
последующим выбором пункта Message (сообщение) (пункт меню 11).
J.8.3
Настройка связи по протоколу Modbus RTU
Уровнемер 5300 конфигурируется с адресом Modbus RTU по умолчанию 246 и со следующими
параметрами связи RTU Modbus по умолчанию:
375
Уровнемер 5300 с преобразователем из HART® в Modbus®

Уровнемер 5300 с преобразователем из HART® в Modbus®
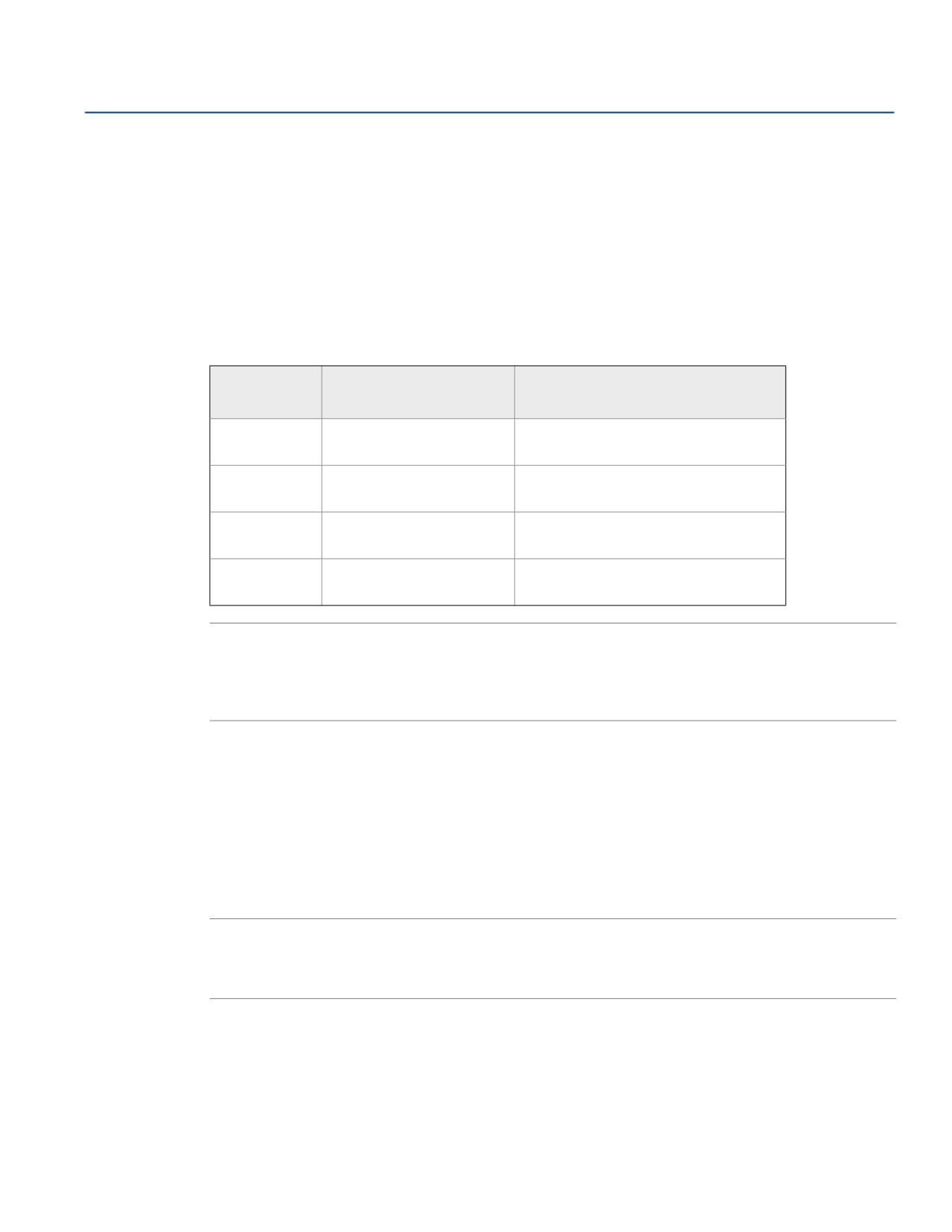
Таблица J-4. Параметры связи по протоколу Modbus RTU
Значение по
Параметр
умолчанию
Настраиваемое значение
Скорость передачи в бодах
9600
1200, 2400, 4800, 9600, 19 200
Стартовые биты(1)
Единица
Единица
Биты данных(1)
Восемь
Восемь
Контроль четности
Нет
Нет, нечетный, четный
Стоповые биты
Единица
Единица или двойка
Диапазон адресов
246
1—255
1.
Стартовые биты и биты данных изменить нельзя.
Чтобы восстановить параметры связи, заданные по умолчанию для Modbus RTU, необходимо ввести
следующее сообщение Modbus:
HMC
Пример настройки параметров RTU Modbus
Требуется использовать адрес 44 для уровнемера 5300, при этом главным компьютером используются
следующие параметры:
Таблица J-5. Параметры связи, используемые хостом (пример)
Параметр
Значение
Скорость передачи в бодах
4800
Стартовые биты
Единица
Биты данных
Восемь
Контроль четности
Нечетное
Стоповые биты
Два
Для настройки уровнемера 5300 для связи с хостом в данном примере в область сообщения ведомого
устройства HART 1 вводится следующая текстовая строка:
HMC A44 B4800 PO S2.
HMC: Данные три символа используются в целях безопасности. Они устраняют риск изменения конфигу-
рационных данных по ошибке.
A44: A указывает на то, что следующий номер является новым адресом (адрес 44). Вводные нули не
нужны.
B4800: B указывает на то, что следующий номер является новой скоростью двоичной передачи (1200,
2400, 4800, 9600, 19 200).
PO: P указывает на то, что следующая буква определяет тип контроля четности (O = нечетный, E = четный
и N = нет).
S2: S указывает на то, что следующая цифра определяет количество стоповых битов (1 = один, 2 = два).
Должны быть указаны только значения, отличающиеся от текущих. Например, если изменен только адрес,
следующая текстовая строка вводится в область сообщения ведомого устройства HART 1 уровнемера
5300:
HMC A127: указывает на то, что 127 является новым адресом.
Уровнемер 5300 с преобразователем из HART® в Modbus®
376

Уровнемер 5300 с преобразователем из HART® в Modbus®
J.8.4
Настройка связи для протокола Levelmaster
Значения по умолчанию и конфигурируемые значения параметров приведены в табл. J-6.
Таблица J-6. Параметры связи для протокола Levelmaster
Значение по
Параметр
умолчанию
Настраиваемое значение
Скорость передачи в бодах
9600
1200, 2400, 4800, 9600, 19 200
Стартовые биты
Единица
Единица
Биты данных
Семь
Семь, Восемь
Контроль четности
Нет
Нет, нечетный, четный
Стоповые биты
Единица
Единица или двойка
Адрес
1
1—99
Чтобы восстановить параметры связи, заданные по умолчанию для Levelmaster, необходимо ввести
следующее сообщение Modbus:
HMC M2
Пример настройки параметров Levelmaster
Требуется использовать адрес 2 для уровнемера 5300, при этом хостом используются следующие
параметры:
Таблица J-7. Параметры, используемые хостом (в случае с использованием протокола
Levelmaster, пример)
Параметр
Значение
Скорость передачи в бодах
9600
Стартовые биты
Единица
Биты данных
Семь
Контроль четности
Нет
Стоповые биты
Единица
Для настройки уровнемера 5300 для связи с хостом в данном примере в область сообщения Modbus
вводится следующая текстовая строка:
HMC M2 A2 B9600 D7 PN S1.
Примечание
Строка, вводимая в область сообщения, должна содержать все параметры.
Внимание: адрес на шине должен быть уникальным.
HMC: данные три символа используются в целях безопасности. Они устраняют риск изменения конфигу-
рационных данных по ошибке.
M2: указывает на использование протокола Levelmaster.
A2: A указывает на то, что следующий номер является новым адресом (адрес 2). Вводные нули не нужны.
377
Уровнемер 5300 с преобразователем из HART® в Modbus®

Уровнемер 5300 с преобразователем из HART® в Modbus®
B9600: B указывает на то, что следующий номер является новой скоростью двоичной передачи (1200,
2400, 4800, 9600, 19 200).
D7: D указывает на то, что используются следующие биты данных (7 = семь, 8 = восемь).
PN: P указывает на то, что следующая буква определяет тип контроля четности (O = нечетный, E = четный
и N = нет).
S1: S указывает на то, что следующая цифра определяет количество стоповых битов (1 = один, 2 = два).
Примечание
Стартовые биты не конфигурируются и не могут быть заданы.
В табл. J-8 и табл. J-9 дается описание используемых в HMC функциях протокола Levelmaster.
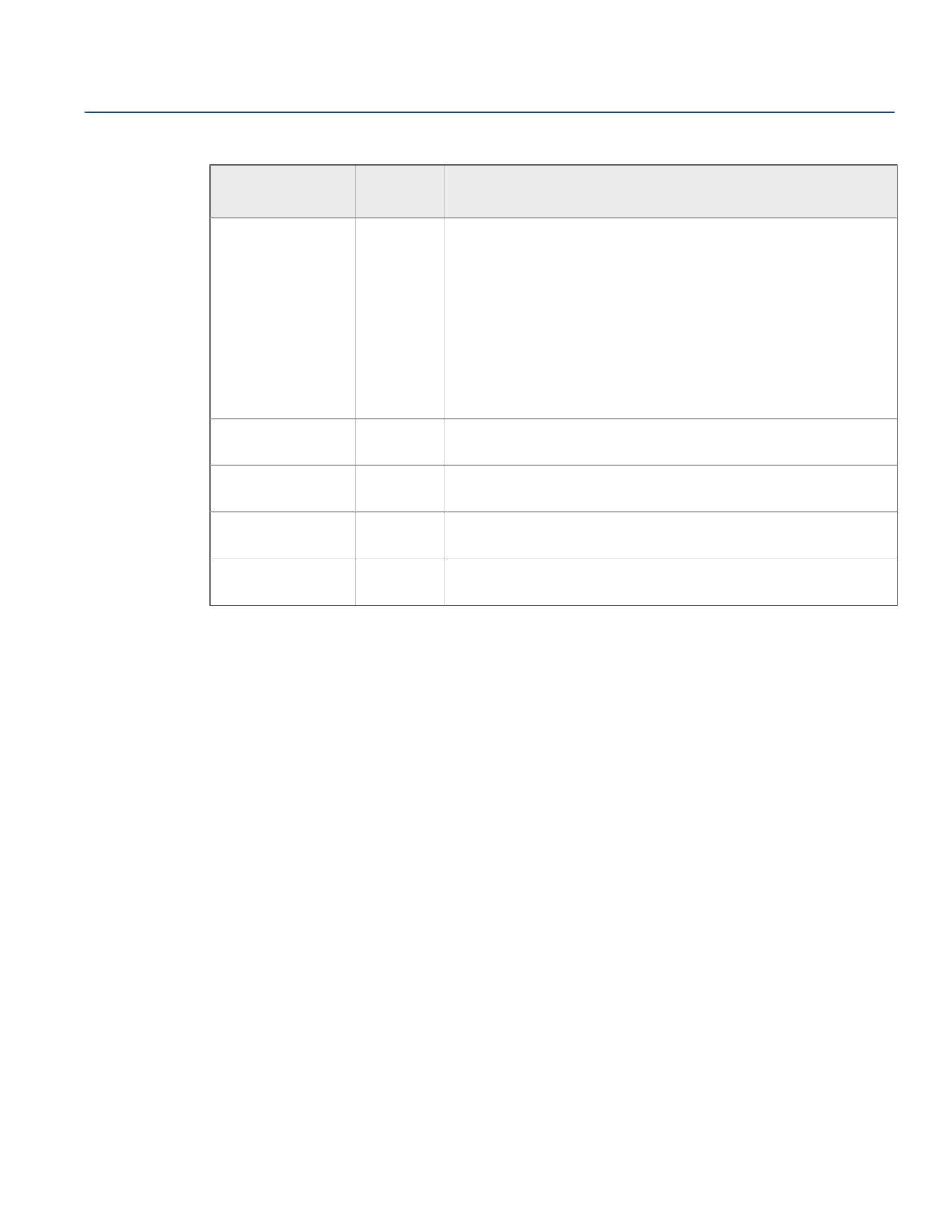
Таблица J-8. Используемые функции протокола Levelmaster
Формат ввода
Описание
Формат вывода
UnnN?
Вернуть идентификационный номер
UnnNnnCcccc
UnnNmm
Установить идентификационный номер
UnnNOKCcccc
UnnF?
Вернуть количество чисел с плавающей запятой
UnnFxCcccc
UnnFx?
Задать количество чисел с плавающей запятой
UnnFOKCcccc
Вернуть количество чисел с плавающей запятой и
UnnDddd.ddFfffEeeee
Unn?
другие данные
WwwwCcccc(1)
1.
В данном случае количество чисел с плавающей запятой устанавливается как 1. Если количество чисел с плавающей запятой установить
на значение 2, формат вывода будет следующим: UnnDddd.ddDddd.ddFfffEeeeeWwwwCcccc
Примечание
Если отправляется одно число с плавающей запятой, это Float1. Если отправляется два числа с
плавающей запятой, это Float 1 перед Float 0.
Уровнемер 5300 с преобразователем из HART® в Modbus®
378

Уровнемер 5300 с преобразователем из HART® в Modbus®
Таблица J-9. Буквы и выражения, используемые в предыдущих таблицах
Буква
Описание
nn используется для идентификации отвечающего ведомого устройства,
nn — это число 00—99 или ** (подстановочный знак).
nn
Для регистра временного хранения адресов EmulCtrl можно задать значение выше 99. В этом случае
адрес будет сокращен до 99.
mm
mm — это новый идентификационный номер ведомого устройства; mm — это число 00—99.
x — это количество чисел с плавающей запятой, возвращаемое при получении ведомым устройством
x
сообщения Unn?, x — это число 0—2.
cccc
Является 16-битной контрольной суммой ЦИК, cccc — шестнадцатеричные символы.
ddd.dd — значение расстояния от ведомого устройства 1. Следует обратить внимание на то, что
ddd.dd
первая буква d может также быть «-» (минусом).
Float 1
Переменная PV ведомого устройства 1.
Float 0
Переменная SV ведомого устройства 1.
fff
Значение температуры. Задается регистром временного хранения 3208 в преобразователе HMC.(1)
Значение ошибки.
Бит 0: неверное значение SV (число с плавающей запятой 0).
eeee
Бит 8: неверное значение температуры.
Бит 12: неверное значение PV (число с плавающей запятой 1).
Wwww
Предупреждающее значение, не используется в данной реализации.
1.
Любые из четырех доступных переменных от любого из пяти ведомых устройств HART могут быть выбраны в качестве источника температуры.
Четыре младших бита (биты 0-3) позволяют выбрать номер переменной. С помощью битов 4-7 производится выбор адреса ведомого
устройства HART. Если используются недействительные значения, значение температуры будет недействительным, при этом бит Error
(ошибка) задан не будет.
Например, если нужно использовать FV от ведомого устройства HART 3 в качестве источника температуры, необходимо записать значение
34 шестнадцатеричное (52 десятичное).
J.8.5
Настройка связи по протоколу Modbus ASCII
Параметры, значения по умолчанию и конфигурируемые значения приведены ниже в табл. J-10.
Таблица J-10. Параметры связи по протоколу Modbus ASCII
Значение по
Параметр
умолчанию
Настраиваемые значения
Скорость
9600
1200, 2400, 4800, 9600, 19 200
передачи в бодах
Стартовые биты
Единица
Единица
Биты данных
Семь
Семь, восемь
Контроль четности
Нет
Нет, нечетный, четный
Стоповые биты
Единица
Единица или двойка
Адрес
1
1—255
Чтобы восстановить параметры связи, заданные по умолчанию для протокола Modbus ASCII, необходимо
ввести следующее сообщение Modbus:
HMC M1
379
Уровнемер 5300 с преобразователем из HART® в Modbus®

Уровнемер 5300 с преобразователем из HART® в Modbus®
Пример настройки параметров Modbus ASCII
Требуется использовать адрес 246 для уровнемера 5300, при этом хостом используются следующие
параметры:
Таблица J-11. Параметры, используемые хостом (в случае с использованием протокола
Modbus ASCII, пример)
Параметр
Значение
Скорость
9600
передачи в бодах
Стартовые биты
Единица
Биты данных
Семь
Контроль
Нет
четности
Стоповые биты
Единица
Для настройки уровнемера 5300 для связи с хостом в данном примере в область сообщения Modbus
вводится следующая текстовая строка:
HMC M1 A246 B9600 D7 PN S1.
Примечание
Строка, вводимая в область сообщения, должна содержать все параметры.
Внимание: адрес на шине должен быть уникальным.
HMC: данные три символа используются в целях безопасности. Они устраняют риск изменения конфигу-
рационных данных по ошибке.
M1: указывает на использование протокола Modbus ASCII.
A246: A указывает на то, что следующий номер является новым адресом (адрес 246). Вводные нули не
нужны.
B9600: B указывает на то, что следующий номер является новой скоростью двоичной передачи (1200,
2400, 4800, 9600, 19 200).
D7: D указывает на то, что используются следующие информационные биты (7 = семь, 8 = восемь).
PN: P указывает на то, что следующая буква определяет тип контроля четности (O = нечетный, E = четный
и N = нет).
S1: S указывает на то, что следующая цифра определяет количество стоповых битов (1 = один, 2 = два).
Примечание
Стартовые биты не конфигурируются и не могут быть заданы.
Уровнемер 5300 с преобразователем из HART® в Modbus®
380

Уровнемер 5300 с преобразователем из HART® в Modbus®
J.9
Обработка аварийных сигналов
Примечание
Если настройка связи Modbus была изменена, а уровнемер еще не начал использовать новые значения,
нужно подключить HART-модем и выждать 60 секунд для того, чтобы изменения вступили в силу.
Если для связи с HMC используются клеммы MA/MB, необходимо отключить преобразователь RS-485,
выключить и снова включить питание уровнемера и выждать 60 секунд для того, чтобы изменения
вступили в силу.
В ином случае настройки связи Modbus будут потеряны, если в уровнемер ввести новое сообщение.
Выходной сигнал от уровнемера Modbus в случае ошибки (такой как неисправность полевого
устройства) может быть сконфигурирован. Значения для регистров Modbus, соответствующие
параметрам PV, SV, TV и QV, также будут изменены (используемые регистры в области 1300, 2000, 2100 и
2200).
Выходное значение сигнализации по умолчанию для каждого протокола указано на следующей странице.
Конфигурирование выходного значения срабатывания сигнализации является опциональным.
Для конфигурирования выходного значения срабатывания сигнализации следует использовать строку
Modbus. Для ввода строки Modbus в RRM необходимо выполнить следующие действия (показано для
Modbus RTU):
1. Запустить RRM и подключить уровнемер.
2. В RRM выбрать Setup (настройка) > General (общие параметры).
Настройка Modbus
3. Выбрать вкладку Communication (связь).
381
Уровнемер 5300 с преобразователем из HART® в Modbus®

Уровнемер 5300 с преобразователем из HART® в Modbus®
4. Нажать кнопку Modbus Setup (настройка Modbus).
5. Ввести строку Modbus и нажать OK.
Доступные сообщения Modbus для выходных аварийных сигналов приведены далее.
Modbus RTU
Строка
Режим сигнализации
HMC EN
Нецифровое значение (NaN), по умолчанию
HMC EF
Зафиксировать, удерживать последнее значение
HMC EU U-0.1
Значение, определяемое пользователем, -0,1 в данном примере
Levelmaster
Строка
Режим сигнализации
HMC M2 EH
Высокое значение, 999,99, по умолчанию
HMC M2 EL
Низкое значение, -99,99
HMC M2 EF
Зафиксировать, удерживать последнее значение
Значение, определяемое пользователем (диапазон от -99,99 до
HMC M2 EU U0
999,99), 0 в данном примере
Modbus ASCII
Строка
Режим сигнализации
HMC M1 EN
Нецифровое значение (NaN), по умолчанию
HMC M1 EF
Зафиксировать, удерживать последнее значение
Значение, определяемое пользователем (диапазон от -99,99 до
HMC M1 EU U-0.1
999,99), -0,1 в данном примере
Уровнемер 5300 с преобразователем из HART® в Modbus®
382

Уровнемер 5300 с преобразователем из HART® в Modbus®
Примечание
После изменения параметров выходного сигнала срабатывания сигнализации следует отключить
HART-модем и выждать по крайней мере 60 секунд для того, чтобы изменения вступили в силу.
Если для связи с HMC используются клеммы MA/MB, необходимо отключить преобразователь RS-485,
выключить и снова включить питание уровнемера и выждать 60 секунд для того, чтобы изменения
вступили в силу.
J.9.1
Проверка вывода сигнализации
Для проверки вывода сигнализации следует использовать RRM для моделирования отказа устройства:
1. Установить HART-соединение с уровнемером посредством RRM.
2. Выбрать Simulation Mode (режим моделирования) в меню Tools (инструменты).
3. Нажать Enable Device Failure Alarm (simulated) (включить сигнализацию отказа устройства
(моделирование)).
4. Нажать кнопку Start (пуск).
5. Отключить HART-модем.
6. Убедиться, что сконфигурированный вывод сигнализации доступен в хосте Modbus.
7. С помощью RRM отключить режим моделирования.
J.9.2
Использование информации о состоянии для оценки
действительности измерения
Уровнемер обновляет информацию о состоянии текущих измерений; данная информация доступна в
регистре битового поля по протоколу связи Modbus.
Информация о состоянии позволяет определить, является ли измеренное значение выходного тока
действующим. Подробную информацию об отдельных битах состояния см. в разделе “Общая настройка
хоста Modbus” на стр. 384.
J.9.3
Обнаружение ошибок по значению Heartbeat
Считывая и оценивая значение Heartbeat, поступающее от устройства, возможно проводить проверку
того, что связь между уровнемером, HMC, RTU и даже системой управления, обменивающейся данными с
RTU, функционирует.
Установить значение Heartbeat на одну из переменных уровнемера (SV, TV или QV). Значение Heartbeat
увеличивается с каждым циклом измерений в устройстве (до тех пор, пока в итоге не начнется заново с
нуля).
Если данное значение не обновляется, это означает, что связь нарушена.
383
Уровнемер 5300 с преобразователем из HART® в Modbus®
Уровнемер 5300 с преобразователем из HART® в Modbus®
J.10
Общая настройка хоста Modbus
При использовании Modbus RTU или Modbus ASCII регистры, принимающие значения состояния, и
переменные должны быть сконфигурированы в хост-системе.
Передача с одинарной точностью (4 байта) чисел с плавающей запятой по стандарту IEEE 754 может быть
организована с различным порядком байтов, определяемым кодом формата с плавающей запятой. В
информации о коде формата, приведенной для каждого дистанционного терминала (RTU), указываются
регистры, которые необходимо опросить на уровнемере 5300 для того, чтобы RTU мог правильно интер-
претировать числа с плавающей запятой. Порядок передачи байтов для каждого кода формата приведен
ниже в табл. J-12.
Таблица J-12. Порядок передачи байтов определен кодом формата с плавающей запятой
Код
Порядок передачи
формата
байтов
Описание
Прямой порядок слов, первым идет
0
[AB] [CD]
старший байт
Обратный порядок слов, первым идет
1
[CD] [AB]
старший байт
Обратный порядок слов, первым идет
2
[DC] [BA]
младший байт
Прямой порядок слов, первым идет
3
[BA] [DC]
младший байт
Примечание
Некоторые главные компьютеры Modbus не могут считывать данную информацию с помощью регистров
ввода (код режима работы 4 для Modbus). Информация регистра ввода также может быть считана
посредством регистра временного хранения (код режима работы 3). В данном случае номер регистра
ввода +5000 используется как номер регистра временного хранения.
Между хост-системой и устройством рекомендуется установить интервал между опросами на 60 секунд
или менее с тремя повторами.
J.10.1
Регистры ввода
Область регистра, начиная с 1300, может быть сконфигурирована для любого из четырех кодов форматов.
Конфигурирование выполняется посредством установки регистра кода формата с плавающей запятой
(регистра временного хранения 3000) на 0—3, как показано в табл. J-12. Данное конфигурирование
может быть выполнено с помощью программы Rosemount Radar Master.
Примечание
В зависимости от номера подчиненного устройства, используемого уровнемером 5300, необходимо
использовать разные регистры с номером ведомого устройства по умолчанию, равным 1. Номер
ведомого устройства определяется HART-адресом.
Уровнемер 5300 с преобразователем из HART® в Modbus®
384

Уровнемер 5300 с преобразователем из HART® в Modbus®
Таблица J-13. Выходные переменные для настраиваемого формата с плавающей запятой (код
по умолчанию 1)
Название
Номер
Примечание
регистра
регистра
Битовая информация в битовом поле.
Бит 0: неверное измерение ведомого устройства 1 PV.
Бит 1: неверное измерение ведомого устройства 1 не PV.
Бит 2: неверное измерение ведомого устройства 1 не PV.
Бит 3: неверное измерение ведомого устройства 1 не PV.
Slave 1 Status Conf
1300
Бит 14: шина HART занята (имеется ведомое устройство в пакете или другое
ведущее устройство)
Бит 15: HTM задача не выполняется (опция недоступна).
Примечание. Бит 1—3 устанавливается при неверном измерении
ведомого устройства 1 не PV. т. е. все три бита устанавливаются
одновременно.
Первичная переменная от ведомого устройства 1, представленная в
Slave 1 PV Conf
1302
формате IEEE 754, используется порядок байтов, установленный в регистре
кода формата с плавающей запятой.
Вторичная переменная от ведомого устройства 1, представленная в
Slave 1 SV Conf
1304
формате IEEE 754, используется порядок байтов, установленный в регистре
кода формата с плавающей запятой.
Третичная переменная от ведомого устройства 1, представленная в
Slave 1 TV Conf
1306
формате IEEE 754, используется порядок байтов, установленный в регистре
кода формата с плавающей запятой.
Четвертичная переменная от ведомого устройства 1, представленная в
Slave 1 FV Conf
1308
формате IEEE 754, используется порядок байтов, установленный в регистре
кода формата с плавающей запятой.
1310—
Slave 2 data
Те же данные, что и для ведомого устройства 1.
1318
1320—
Slave 3 data
Те же данные, что и для ведомого устройства 1.
1328
1330—
Slave 4 data
Те же данные, что и для ведомого устройства 1.
1338
1340—
Slave 5 data
Те же данные, что и для ведомого устройства 1.
1348
Область регистра уровнемера 5300, начиная с регистра 2000, используется для хостов, которые требуют
код формата с плавающей запятой 0 (см. табл. J-14).
Коды формата с плавающей запятой 2 и 3 используют области регистра 2100 и 2200, соответственно (см.
табл. J-15 и табл. J-16).
385
Уровнемер 5300 с преобразователем из HART® в Modbus®
Уровнемер 5300 с преобразователем из HART® в Modbus®
Таблица J-14. Выходные переменные для кода формата с плавающей запятой 0
Название
Номер
Примечание
регистра
регистра
Битовая информация в битовом поле:
Бит 0: неверное измерение ведомого устройства 1 PV.
Бит 1: неверное измерение ведомого устройства 1 SV.
Бит 2: неверное измерение ведомого устройства 1 TV.
Бит 3: неверное измерение ведомого устройства 1 FV.
Slave 1 Status
2000
Бит 14: шина HART занята (имеется ведомое устройство в пакете или
другое ведущее устройство)
Бит 15: HTM задача не выполняется (опция недоступна).
Примечание. Бит 1—3 устанавливается при неверном измерении
ведомого устройства 1 не PV, т. е. все три бита устанавливаются
одновременно.
Первичная переменная от ведомого устройства 1, представленная в
Slave 1 PV
2002
формате IEEE 754, используется код формата с плавающей запятой 0.
Вторичная переменная от ведомого устройства 1, представленная в
Slave 1 SV
2004
формате IEEE 754, используется код формата с плавающей запятой 0.
Третичная переменная от ведомого устройства 1, представленная в
Slave 1 TV
2006
формате IEEE 754, используется код формата с плавающей запятой 0.
Четвертая переменная от ведомого устройства 1, представленная в
Slave 1 FV (QV)
2008
формате IEEE 754, используется код формата с плавающей запятой 0.
Уровнемер 5300 с преобразователем из HART® в Modbus®
386

Уровнемер 5300 с преобразователем из HART® в Modbus®
Таблица J-15. Выходные переменные для кода формата с плавающей запятой 2
Название
Номер
регистра
регистра
Примечание
Битовая информация в битовом поле:
Бит 0: неверное измерение ведомого устройства 1 PV.
Бит 1: неверное измерение ведомого устройства 1 SV.
Бит 2: неверное измерение ведомого устройства 1 TV.
Бит 3: неверное измерение ведомого устройства 1 FV.
Slave 1 Status
2100
Бит 14: шина HART занята (имеется ведомое устройство в пакете или
другое ведущее устройство)
Бит 15: HTM задача не выполняется (опция недоступна).
Примечание. Бит 1—3 устанавливается при неверном измерении
ведомого устройства 1 не PV, т. е. все три бита устанавливаются
одновременно.
Первичная переменная от ведомого устройства 1, представленная в
Slave 1 PV
2102
формате IEEE 754, используется код формата с плавающей запятой 2.
Вторичная переменная от ведомого устройства 1, представленная в
Slave 1 SV
2104
формате IEEE 754, используется код формата с плавающей запятой 2.
Третичная переменная от ведомого устройства 1, представленная в
Slave 1 TV
2106
формате IEEE 754, используется код формата с плавающей запятой 2.
Четвертая переменная от ведомого устройства 1, представленная в
Slave 1 FV (QV)
2108
формате IEEE 754, используется код формата с плавающей запятой 2.
Таблица J-16. Выходные переменные для кода формата с плавающей запятой 3
Название
Номер
Примечание
регистра
регистра
Битовая информация в битовом поле:
Бит 0: неверное измерение ведомого устройства 1 PV.
Бит 1: неверное измерение ведомого устройства 1 SV.
Бит 2: неверное измерение ведомого устройства 1 TV.
Бит 3: неверное измерение ведомого устройства 1 FV.
Slave 1 Status
2200
Бит 14: шина HART занята (имеется ведомое устройство в пакете или
другое ведущее устройство)
Бит 15: HTM задача не выполняется (опция недоступна).
Примечание. Бит 1—3 устанавливается при неверном измерении
ведомого устройства 1 не PV, т. е. все три бита устанавливаются
одновременно.
Первичная переменная от ведомого устройства 1, представленная в
Slave 1 PV
2202
формате IEEE 754, используется код формата с плавающей запятой 3.
Вторичная переменная от ведомого устройства 1, представленная в
Slave 1 SV
2204
формате IEEE 754, используется код формата с плавающей запятой 3.
Третичная переменная от ведомого устройства 1, представленная в
Slave 1 TV
2206
формате IEEE 754, используется код формата с плавающей запятой 3.
Четвертая переменная от ведомого устройства 1, представленная в
Slave 1 FV (QV)
2208
формате IEEE 754, используется код формата с плавающей запятой 3.
387
Уровнемер 5300 с преобразователем из HART® в Modbus®

Уровнемер 5300 с преобразователем из HART® в Modbus®
Единицы измерения
Единицы измерения различных ведомых устройств HART хранятся в регистрах ввода в качестве кодов
единиц измерения, представленных в табл. J-17. Преобразование из кодов единиц измерения в
фактические единицы измерения представлено в табл. J-18 на стр. 388.
Таблица J-17. Единицы измерения и соответствующие регистры ввода
Название регистра
Номер регистра
Примечание
Slave 1 PV Units
104
Slave 1 SV Units
108
См. табл. J-18 для получения информации о
преобразовании кодов единиц измерения в
Slave 1 TV Units
112
фактические единицы измерения.
Slave 1 FV (QV) Units
116
Таблица J-18. Преобразование кода единицы в единицу измерения
Код единицы
Единица
Код единицы
Единица
измерения
измерения
измерения
измерения
Объем
Длина
Американские
40
44
Футы
галлоны
41
Литры
45
Метры
42
Британские галлоны
47
Дюймы
43
Кубические метры
48
Сантиметры
46
Баррели
49
Миллиметры
111
Кубические ярды
Температура
112
Кубические футы
33
Градусы Фаренгейта
113
Кубические дюймы
32
Градусы Цельсия
J.11
Специальная конфигурация хоста Modbus
Контроллер телемеханики необходимо сконфигурировать для связи и корректной интерпретации
данных при считывании регистров ввода с уровнемера 5300.
Скорость передачи в бодах
Указанная ниже скорость в бодах является рекомендуемой. Если используется другая скорость передачи,
уровнемер 5300 и RTU должны быть настроены на одну и ту же скорость передачи данных по каналу
связи.
Формат с плавающей запятой
См. раздел “Общая настройка хоста Modbus” на стр. 384.
Уровнемер 5300 с преобразователем из HART® в Modbus®
388

Уровнемер 5300 с преобразователем из HART® в Modbus®
Тип данных RTU
Тип данных RTU указывает на то, какую конфигурацию необходимо использовать в RTU для того, чтобы
дистанционный терминал мог правильно интерпретировать число с плавающей запятой, переданное с
уровнемера 5300 по протоколу Modbus.
Основной номер регистра ввода
Регистры данных в уровнемере 5300 с протоколом Modbus пронумерованы в точном соответствии с
порядком, в котором они передаются при осуществлении связи по протоколу Modbus. В некоторых RTU
используются другие соглашения о присвоении имен и настройки RTU для опроса правильных регистров
из протокола Modbus уровнемера 5300; для каждого RTU указывается, соответственно, основной номер
регистра ввода. Например, если основной номер регистра ввода равен 1 для RTU, в адрес RTU нужно
ввести регистр ввода 1302 протокола Modbus уровнемера 5300 как регистр ввода 1303.
J.11.1
Контроллер измерительный серии ROC800
Рисунок J-9. Схема подключения 5300 Modbus к контроллеру серии ROC800
ROC800 Series
5300 Modbus
RS-485
MA
A (RX/TX+)
MB
B (RX/TX-)
ПИТАНИЕ
Y
ПИТАНИЕ
Z
COM
Электропитание
От + 8 до + 30 В пост. тока
(макс. параметры)
ЗЕМЛЯ
Таблица J-19. Значения параметров (для контроллеров серии ROC800)
Параметр
Значение
Скорость передачи в бодах
9600
Формат с плавающей запятой
0
Тип данных RTU
Код преобразования 66
Основной номер регистра ввода
0
Основной номер регистра ввода необходимо добавить к адресу регистра ввода уровнемера 5300. В
данном случае для регистра 1300 в качестве адреса должно быть введено значение 1300.
389
Уровнемер 5300 с преобразователем из HART® в Modbus®

Уровнемер 5300 с преобразователем из HART® в Modbus®
J.11.2
Контроллер измерительный FloBoss 107
Рисунок J-10. Схема подключения 5300 Modbus к контроллеру FloBoss 107
FloBoss 107
5300 Modbus
RS-485
MA
A
MB
B
ПИТАНИЕ
+
NC
ПИТАНИЕ
-
NC
ПИТАНИЕ
ЗЕМЛЯ
Электропитание
От + 8 до + 30 В пост. тока
(макс. параметры)
ЗЕМЛЯ
Таблица J-20. Значения параметров (для FloBoss 107)
Параметр
Значение
Скорость передачи в бодах
9600
Формат с плавающей запятой
0
Тип данных RTU
Код преобразования 66
Основной номер регистра ввода
0
Основной номер регистра ввода необходимо добавить к адресу регистра ввода уровнемера 5300. В
данном случае для регистра 1300 в качестве адреса должно быть введено значение 1300.
J.11.3
ABB TotalFlow
Рисунок J-11. Схема подключения 5300 Modbus к ABB TotalFlow
5300 Modbus
TOTALFLOW
СВЯЗЬ 1/2
ПИТАНИЕ
+
1 VBAT
ПИТАНИЕ
-
2
ЗЕМЛЯ
MA
3
MB
4
5
6
ШИНА -
7
8
ШИНА +
9
Уровнемер 5300 с преобразователем из HART® в Modbus®
390

Уровнемер 5300 с преобразователем из HART® в Modbus®
Таблица J-21. Значения параметров (для ABB TotalFlow)
Параметр
Значение
Скорость передачи в бодах
9600
Формат с плавающей запятой
0
Тип данных RTU
16-битный Modicon
Основной номер регистра ввода
1
Основной номер регистра ввода необходимо добавить к адресу регистра ввода уровнемера 5300. В
данном случае для регистра 1302 в качестве адреса должно быть введено значение 1303.
J.11.4
Thermo Electron Autopilot
Рисунок J-12. Схема подключения 5300 Modbus к Thermo Electron Autopilot
AutoPILOT
5300 Modbus
CEB TB1
MA
1 RX +
MB
2 RX -
R +
ПИТАНИЕ
ПИТАНИЕ
-
Электропитание
От + 8 до + 30 В пост. тока
(макс. параметры)
ЗЕМЛЯ
Таблица J-22. Значения параметров (для Thermo Electron Autopilot)
Параметр
Значение
Скорость передачи в бодах
9600
Формат с плавающей запятой
1
Тип данных RTU
IEEE Flt 2R
Основной номер регистра ввода
0
Основной номер регистра ввода необходимо добавить к адресу регистра ввода уровнемера 5300. В
данном случае для регистра 1302 в качестве адреса должно быть введено значение 1302.
391
Уровнемер 5300 с преобразователем из HART® в Modbus®

Уровнемер 5300 с преобразователем из HART® в Modbus®
J.11.5
Контроллер измерительный ControlWave Micro
Рисунок J-13. Схема подключения 5300 Modbus к контроллеру ControlWave Micro
ControlWave Micro
5300 Modbus
Com Port 3 (C3) RS-485
MA
MB
1
ПИТАНИЕ+
6
2
ПИТАНИЕ-
7
TXD-
3
8
TXD+
4
Электропитание
9
ЗЕМЛЯ
5
От + 8 до + 30 В пост. тока
(макс. параметры)
DB9 штепсель
ЗЕМЛЯ
Таблица J-23. Значения параметров (в случае использования контроллера ControlWave Micro)
Параметр
Значение
Скорость передачи в бодах
9600
Формат с плавающей запятой
2 (FC 4)
32-битные регистры представлены как
Тип данных RTU
2 16-битных регистра
Основной номер регистра ввода
1
Основной номер регистра ввода необходимо добавить к адресу регистра ввода уровнемера 5300. В
данном случае для регистра 1302 в качестве адреса должно быть введено значение 1303.
J.11.6
ScadaPack
Рисунок J-14. Схема подключения 5300 Modbus к ScadaPack 32
SCADAPack32
RS-485 на послед. порте COM1
5300 Modbus
1 +5 В
MA
2 RX-
MB
3 TX-
ПИТАНИЕ+
4 ЗЕМЛЯ
ПИТАНИЕ-
5 RX+
6 TX+
Электропитание
7 Не используется
8 Не используется
От + 8 до + 30 В пост. тока
(макс. параметры)
Огранич. защита от замык.
на землю
Уровнемер 5300 с преобразователем из HART® в Modbus®
392

Уровнемер 5300 с преобразователем из HART® в Modbus®
Таблица J-24. Значения параметров (для ScadaPack 32)
Параметр
Значение
Скорость передачи в бодах
9600
Формат с плавающей запятой
0
Формат с плавающей
Тип данных RTU
запятой
Основной номер регистра ввода
30001
Основной номер регистра ввода необходимо добавить к адресу регистра ввода уровнемера 5300. В
данном случае для регистра 1302 в качестве адреса должно быть введено значение 31303.
J.11.7
Kimray Inc. DACC 2000/3000
В данной таблице представлены типы входных данных в ПО IMI Kimray Inc. и соответствующее значение.
Порт связи должен быть настроен для использования протокола Tank Levels (уровни резервуаров).
Таблица J-25. Типы входных данных для Kimray Inc. и соответствующие значения
Тип входных данных
Переменная уровнемера
Kimray Inc.
5300
Формат
Tank Level1
PV
ddd.dd.alt. -dd.dd
Tank Level2
SV
ddd.dd.alt-dd.dd
J.12
Поиск и устранение неисправностей
Отсутствует связь на шине RS-485 (MA, MB)
Следует убедиться в том, что кабели подсоединены.
Следует убедиться в том, что PWR+ соединен с «+», а PWR- с «-» на источнике питания.
Следует убедиться, что уровнемер 5300 поставляется с номиналом 8—30 В пост. тока (максимальное
значение).
Поменять клеммы MA/MB если вы не уверены в полярности.
При использовании преобразователя RS-485 необходимо убедиться в его правильной установке и
настройке.
Для последнего уровнемера 5300 может потребоваться установка согласующего резистора на 120 Ом
между МА и МВ.
Отсутствует связь с уровнемером 5300 в RRM
Использование HART+, HART-
HART-модем неправильно подключен.
В RRM неверно задан адрес опроса (по умолчанию 1).
Использование клемм МА и МВ
См. «отсутствует связь на шине RS-485».
В RRM неверно задан адрес опроса (по умолчанию 1).
Выключить и снова включить устройство и подождать 20 секунд перед опросом.
393
Уровнемер 5300 с преобразователем из HART® в Modbus®
Уровнемер 5300 с преобразователем из HART® в Modbus®
Отсутствует связь по протоколу Modbus RTU
См. «отсутствует связь на шине RS-485».
Убедиться, что Настройка соединения по протоколу Modbus выполнена должным образом.
Убедиться в том, что адрес Modbus RTU уникален для шины.
Выключить и снова включить устройства и повторить попытку соединения.
Проверить настройки связи RTU.
Отсутствует связь по протоколу Modbus ASCII
См. «отсутствует связь на шине RS-485».
Убедиться, что Настройка соединения по протоколу Modbus выполнена должным образом.
Убедиться в том, что адрес Modbus ASCII уникален для шины.
Выключить и снова включить устройство, подождать 40 секунд перед началом обмена данными.
Проверить настройки связи RTU.
Отсутствует связь по протоколу Levelmaster
См. «отсутствует связь на шине RS-485».
Убедиться, что Настройка соединения по протоколу Modbus выполнена должным образом.
Убедиться в том, что адрес Levelmaster уникален для шины.
Выключить и снова включить устройство, подождать 40 секунд перед началом обмена данными.
Проверить настройки связи RTU.
J.13
Обновление встроенной программы HMC в
Rosemount Radar Master
Встроенное программное обеспечение HMC обновляется посредством Rosemount Radar Master (RRM).
Подробное описание порядка выполнения обновления встроенного программно-аппаратного
обеспечения приведено на следующих страницах.
Примечание
После обновления уровнемера все настройки в HMC будут утеряны. После завершения обновления
требуется переконфигурировать настройки связи Modbus и обработки сигнализации.
Примечание
Во время обновления встроенного ПО адрес HMC Modbus RTU должен быть 246, т. е. адресом по
умолчанию. Другие устройства Modbus RTU с адресом 246 должны быть отключены.
Примечание
Нельзя прерывать связь между ПК и уровнемером 5300 во время загрузки встроенного ПО.
Уровнемер 5300 с преобразователем из HART® в Modbus®
394

Уровнемер 5300 с преобразователем из HART® в Modbus®
1. Запустить RRM и выбрать Communication Preferences (опции связи) в меню View (вид).
2. Перейти во вкладку Modbus и применить следующие настройки:
- Модем: RS-485
- Скорость в бодах: согласно конфигурации в HMC (по умолчанию 9600)
- Стоповые биты: согласно конфигурации в HMC (по умолчанию 1)
- Контроль четности: согласно конфигурации в HMC (по умолчанию None (нет))
- Квитирование: RTS/CTS
- Задержка времени ответа: 1000 мс
- Попытки: 3
3. Выбрать Enable Modbus Communication (включить связь по протоколу Modbus) и нажать OK.
4. Если HMC конфигурируется под связь по протоколам Modbus ASCII или Levelmaster, необходимо
выключить и включить питание уровнемера (при этом HMC в течение 20 секунд будет осуществлять
связь через Modbus RYU и до истечения данного времени возможно соединение с RRM).
5. Открыть окно Search Device (поиск устройств) и убедиться, что Modbus выбран в списке протоколов.
6. Выполнить поиск HMC, выбрав Scan Address Range (сканировать диапазон адресов), выбрать
начальный и конечный адрес для Modbus. По умолчанию адресом преобразователя HMC Modbus
является 246.
7. Нажать кнопку Start Scan (начать сканирование).
395
Уровнемер 5300 с преобразователем из HART® в Modbus®
содержание .. 17 18 19 20 ..