Nissan Versa Sedan. Instruction - part 536
LAN-22
< PRECAUTION >
[CAN]
PRECAUTIONS
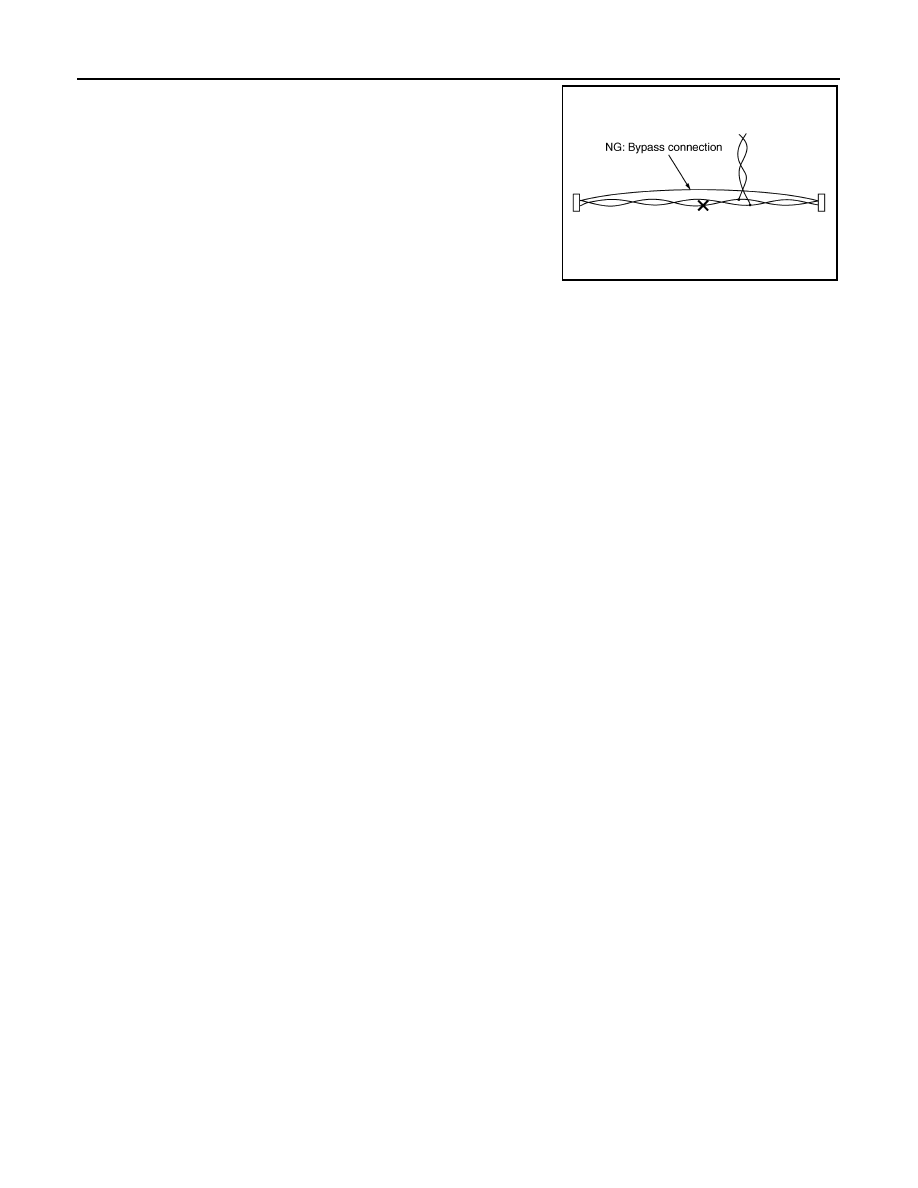
• Bypass connection is never allowed at the repaired area.
NOTE:
Bypass connection may cause CAN communication error. The
spliced wire becomes separated and the characteristics of twisted
line are lost.
• Replace the applicable harness as an assembly if error is detected on the shield lines of CAN communica-
tion line.
SKIB8767E