содержание .. 10 11 12 13 14 15 16 17 18 19 20 ..
1.3.3. Механизмы передвижения кранов и перегружателей
В целом конструкция механизмов передвижения козловых кранов и мостовых
перегружателей аналогична соответствующим механизмам мостовых кранов. Однако
имеются и существенные конструктивные различия, связанные с гораздо большими
нагрузками на ходовые колёса и спецификой режимов их работы. Для механизмов
передвижения козловых кранов и мостовых перегружателей по конструктивным
соображениям нашёл применение раздельный привод. Число приводных колес
изменяется у разных типов кранов и перегружателей от 1/4 до 1/2 общего числа
колес. Необходимое их количество, как известно, определяется по условию
сцепления с рельсами. В зависимости от массы кранов и их грузоподъемностей
применяются различные схемы приводов передвижения по числу и диаметру колес.
При этом изменяется схема балансирной подвески не только по количеству
ходовых колес, но и числу крановых рельсов от 2 до 6. Наиболее
распространенные схемы балансирных подвесок колес показаны на рис. 1.31.

Балансирную подвеску выполняют различным образом в зависимости от требуемого
количества ходовых колес в одной опоре. Каждая опора состоит из двух
тележек, а число колёс в тележке и их диаметры зависят от нагрузки на опору.
Это может быть двухколесная тележка (см. рис. 1.31, а), трехколесная тележка
с двумя балансирами (см. рис. 1.31, б), четырехколесная тележка с двумя
балансирами (см. рис. 1.31, в), пятиколесная с четырьмя балансирами (см.
рис. 1.31, г), шестиколесная с пятью балансирами (см. рис. 1.31, е),
семиколесиая с шестью балансирами (см. рис. 1.31, з), восьмиколесная с семью
балансирами (см. рис. 1.31, и). Четырех-, шести- и восьмиколесные тележки
могут опираться как на один, так и на два подкрановых рельса (см. рис. 1.31,
д, ж, к). Из условия унификации балансиров предпочтение следует отдать
схемам а, в, и.
Четырехрельсовые схемы применяются при больших массах кранов и грузов, а
также при невысокой несущей способность и грунтов под крановыми рельсами.
Наиболее надежно для тяжелых козловых кранов и перегружателей бетонное
основание.
Поскольку при проектировании целесообразно снижение габаритов и масс
механизмов, желательно по возможности до минимума уменьшать расстояния между
ходовыми колесами. В расчетной практике для достижения этого длины
балансиров выражают через диаметры ходовых колес [1.6], а массу балансирной
системы исследуют на минимум в зависимости от принятого диаметра колес и
числа подкрановых рельсов.
По конструктивным соображениям для механизмов передвижения козловых кранов и
мостовых перегружателей преимущественно применяется раздельный привод.
Количество приводных колёс при этом определяется, как известно, по условию
сцепления колес с рельсами и составляет от 1/4 до 1/2 от общего числа
ходовых колес крана.
Для приводов передвижения кранов и перегружателей используются электрические
двигатели с фазными или реже с короткозамкнутыми роторами, а для изменения
параметров движения и получения заданных скоростей обычно применяются
цилиндрические горизонтальные и вертикальные, а также червячные и
планетарные редукторы. Например, вертикальные редукторы с открытой (рис.
1.32, а) или без открытой передачи (рис. 1.32, б), с приводом на одно (рис.
1.32, а, б) или на два колеса через открытую передачу (рис. 1.32, в, г) и
др. При скоростях передвижения более 1 м/мин механизмы передвижения должны
оснащаться тормозами, обычно колодочными электромагнитными или с
гидротолкателями, устанавливаемыми на быстроходных валах.
Механизмы передвижения четырехрельсовых кранов и перегружателей выполняют с
приводом колёс разных рельсов от одного двигателя для лучшей синхронизации
скоростей передвижения.
Рис. 1,32. Схемы механизмов передвижения кранов: а - с открытой передачей; б с вер шкальным редуктором, без открытой передачи с приводом на одно колесо; в, г - с вертикальным редуктором и приводом на два колеса

На мостовых перегружателях Старо-Краматорского машиностроительного завода
(рис. 1.33, б) предусмотрено жёсткое соединение приводных колёс. Так, от
зубчатого колеса 4 вращение передаётся ходовому колесу 5, на котором оно
закреплено, а через вал 6 — на второе приводное колесо через шлицевое
соединение 7. Выравнивание нагрузок между колёсами разных рельсов
осуществляется посредством универсального шарнира 8. Продольные и поперечные
(разновысотность) уклоны рельсовых путей компенсируются балансирной
подвеской колёс (см. рис. 1.31, д, ж, к), копирующей продольные и поперечные
уклоны. Учитывая небольшое расстояние между рельсами, применены колёса и
рельсы с полукруглой головкой, за счет чего при изменении угла наклона колёс
не изменяется напряжение в зоне контакта колеса с рельсом.
Эта схема требует применения валов большего диаметра.
Для козловых кранов и перегружателей с двухребордными колёсами и рельсами с
плоской головкой эта схема неприменима, поэтому вращение от двигателей 1 и
редукторов 2 передается валами 3 с шестернями 4 открытых зубчатых передач и
шарнирные муфты 5, для компенсации поперечных уклонов рельсов (рис. 1.33,
а). Изменение продольных уклонов производится с помощью балансирной подвески
колёс (см. рис. 1.31, д, ж, к).
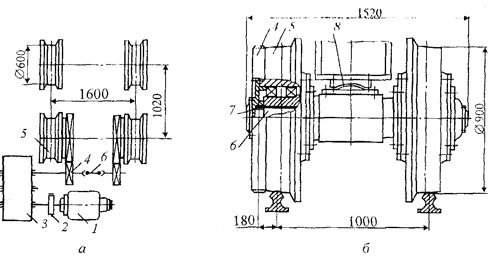
Рис. 1.33. Механизмы передвижения четырехрельсовых кранов
и перегружателей
Механизмы передвижения судостроительных козловых кранов оборудуют
двухскоростными приводами, выполненными по схеме с микроприводом. Это
обусловлено необходимостью транспортирования краном элементов корпусов
строящихся судов на значительные расстояния - от сборочного цеха до стапеля,
для чего и требуется повышенная скорость, а для обеспечения точности монтажа
используется пониженная скорость.