содержание .. 1 2 3 4 5 6 7 8 9 10 ..
ГЛАВА 1 МИКРОПРОЦЕССОРЫ В ЗАБОЙНОЙ АВТОМАТИКЕ
Повышение требований к гибкости и надежности систем управления
техно-логическими процессами, а также значительный рост объема
перерабатываемой
информации и выполняемых функций привели к появлению в этих системах
параллельной обработки данных и сетей связи, построенных на основе ЭВМ.
Удобным и экономически эффективным техническим средством реализации
новых
принципов управления явились микропроцессоры.
Микропроцессор (МП) — автономное функционально законченное устрой
ство, состоящее из одной или нескольких программно-управляемых больших
интегральных схем (БИС), включающее все средства, необходимые для
обработки
информации и управления данными, рассчитанное на совместную работу с
устройствами памяти и ввода-вывода информации. В состав МП входят:
арифметико-логическое устройство (АЛУ); схема управления и
синхронизации; регистр-аккумулятор; сверхоперативное запоминающее
устройство (СОЗУ); про
граммный счетчик; адресный стек, регистр команд и дешифратор кода
операции
параллельные шины ввода-вывода; схема управления памятью и вводом;
выводом.
Различают универсальные и специализированные МП (специализированны!
ориентированы на конкретное применение). Используют МП совместно с микро
процессорными наборами (МН), которые являются совокупностью совместимы:
БИС, разработанных для построения различных микропроцессорных средств
обработки информации. Обычно в МН входят: МП; оперативное запоминающее
устройство (ОЗУ); постоянное запоминающее устройство (ПЗУ), допускающее
смену записанной в нем информации в специальном нерабочем режиме; БИС
микропрограммного управления; БИС ввода-вывода или интерфейса внешних
устройств.
Первый МП появился в 1971 г. (Intel 4004) в США, однако в настоящее вра
мя известно уже более ста типов МП, точнее микропроцессорных наборов
БИС;
поскольку фирмы-изготовители предлагают обычно наборы из нескольких БИС,
МП, ОЗУ, ПЗУ, полупостоянной памяти (ППЗУ), устройств ввода-вывода и т.
д.
Такое разнообразие МП определяется различным сочетанием их
характеристик.
Улучшение характеристик МП непосредственно связано с совершенствованием
технологии. Именно она определила общепринятое деление всех МП на три
по-
коления: I — на основе р-канальной (металл — окисел — полупроводник) МОП-
технологии; II — на основе /t-канальной и комплементарной МОП-технологии;
III — на основе биполярной технологии.
При всем многообразии МП можно выделить общие для всех типов
характеристики и свойства:
а) малая разрядность слова: 2, 4, 8, 12, 16;
б) ограниченная мощность набора команд (обычно требуется 2—5 команд для
выполнения операции, эквивалентной одной команде мини-ЭВМ);
в) аппаратно подкрепленная организация связи подпрограмм (с помощью
стека);
г) программно-управляемый ввод-вывод;
д) низкая стоимость микро-ЭВМ (обычно 1—5 % стоимости мини-ЭВМ) [1,].
Можно с уверенностью сказать, что темпы разработок специализированных
устройств вычислительной техники и дискретной автоматики не ниже темпов
роста универсальных средств [2]. Вместе с тем использование в
специализированных вычислительных комплексах (СВК) структур,
заимствованных от универсальных средств, чаще всего оказывается
неэффективным. Последнее объясняется тем, что структура СВК более жестко
связана с алгоритмами
решаемых задач. Среди задач, наиболее часто встречающихся в СВК, можно
выделить [3] следующие: связанные с преобразованием координат,
опознаванием
"ир.ипи ii их масштабным преобразованием,
диагностики состояния оборудование и систем; анализа и обработки
сигналов; управления и обработки информации о технологических процессах;
предварительного преобразования информации
управления; обработки текущей информации и выработки управляющих
1,1'жтннй; комбинаторные и экстремальные задачи на графах и другие.
Специфика реализации указанных задач обусловливает ряд архитектурных
ценностей СВК, таких как постоянство реализуемых алгоритмов, наличие
принципиальных функций в наборе операций и команд, нестандартная длина
разряд-сетки, использование проблемно ориентированных входных языков и
широкие возможности их аппаратной интерпретации [4]. Особенности СВК,
преимущественно эксплуатационного характера, определяют построение их
средств по модульному принципу.
Принцип модульности, развиваемый на информационном, функциональном,
программном и конструктивном уровнях, в настоящее время прочно
утвердился и качестве основного принципа проектирования СВК, в
наибольшей степени от-пгч;по1цего требованиям унификации технических
решений, повышения надежности и живучести систем, обеспечения
отказоустойчивости, контроле- и ремонтопригодности средств СВК. Такой
принцип положен в основу одного из наиболее перспективных направлений в
теории проектирования вычислительных н управляющих средств — модульного
проектирования (МПР) систем. Одним из iiiiiipocon, возникающих при МПР
СВК, является выбор технических средств п элементной базы (ЭБ).
Для расширения возможностей одноплатных михро-ЭВМ разрабатываются, как
правило, наборы функциональных модулей, которые могут работать совместно
с этими микро-ЭВМ. В состав таких наборов входят модули ввода-вывода,
ОЗУ, ПЗУ, питания, преобразования сигналов, решения специальных функций.
1 .пене модули выполняются на базе конструкторско-технологических
решений, принятых для одноплатных микро-ЭВМ, и должны соответствовать
тем же нормативно-техническим документам, что и микро-ЭВМ. Так, в состав
системы NMP фирмы «Сименс» входят более 70 различных типов совместимых
аппарат-пых и программных модулей.
Разработчикам отечественных комплексов унифицированных электронных
модулей (КУЭМ) приходится учитывать технические решения электронной
промышленности, направленные на стандартизацию и унификацию
микропроцессорных средств, прежде всего в области конструктивов
(обеспечение конструкторско-технологической совместимости) и системы
параметров (обеспечение параметрической, информационной,
электромагнитной и других видов совместимости), методов и средств
контроля и отладки. Однако именно в этих направлениях существуют
наибольшие отставания стандартизации, что отрицательно сказывается на
реализации программ разработки КУЭМ СВК.
Для повышения технического уровня изделий шахтной автоматики и
автоматизируемого оборудования НПО «Автоматгормаш» выполнило цикл работ
по созданию КУЭМ СВК в искробезопасном исполнении для автоматизации
забойного оборудования. В качестве элементной базы для построения КУЭМ
используется микропроцессорный набор серии КР580 [5]. Он состоит из
восьми интегральных микросхем (ИМС).
Функциональное назначение ИМС набора КР580:
программируемый интерфейс связи — микросхема ИК51 — осуществляет
преобразование параллельного 8-разрядного кода в последовательный и
наоборот;
программируемый таймер — микросхема ИК53 — служит для генерации сигналов
с программируемыми временными характеристиками;
программируемый интерфейс периферийных устройств — микросхема 1IK.55 —
применяется для сопряжения периферийных устройств: дисплея,
телетайпа, ЗУ с шиной данных микропроцессорных устройств;
программируемый контроллер прямого доступа к памяти — ИМС ИК57 —
предназначен для ускорения параллельного обмена данными между памятью и
периферийными устройствами путем прямого доступа к памяти по четырем
каналам. Управляющее слово программы задает режим работы ИМС,
приоритет-iini'Tii каналов, начальный адрес и длину передаваемого
массива данных;
программируемый контроллер прерываний — ИМС ИК59 — предназначен дли
управления многоуровневым прерыванием с обслуживанием восьми запросов
(количество обслуживаемых запросов на прерывание работы микропроцессора
можно увеличить до 64 путем каскадирования);
центральный процессорный элемент — ИМС ИК80 — представляет собой
8-разрядный функционально законченный процессорный элемент без
возможности аппаратного наращивания разрядности обрабатываемых данных.
Система команд ИМС ИК80 выполняется по машинным циклам (МЦ),
продолжительность которых составляет 3—5 периодов тактового питания,
отсчитываемых по нарастающим перепадам сигнала.
Кроме того, в микропроцессорный набор КР580 входят еще две интегральные
микросхемы: буферные 8-разрядные регистры и шинные 8-разрядные
формирователи.
Основные характеристики ИМС микропроцессорной серии КР580 [5] типа МОП
представлены ниже.
Период синхронизации, сигн. / не 500
Разрядность, бит 8
Число внутренних регистров, как программно-доступных, так и
вспомогательных 19
Потребляемая мощность, мВт 750
Напряжение питания, В 5,5; 12,0
Число компонент в ИМС, тыс. шт. 5
Число выводов в корпусе ИМС, шт. 48
Для аппаратной реализации функциональных задач автоматизации
угледобывающих комбайнов и проходческого оборудования разработан
специальный набор блоков (модулей), обеспечивающий построение различных
систем автоматизации. Для автоматизации добычных комбайнов разработаны
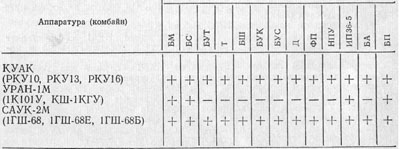
унифицированные блоки:
блок микропроцессора (БМ), блок сопряжения (БС) — для обеспечения
регулирования нагрузки и скорости;
блок управления табло (БУТ), блок табло (Т), блок шифратора (БШ) — для
обеспечения отображения информации на дисплее, диагностики и защиты;
блок управления комбайном и конвейером (БУК), блок управления скоростью
(БУС), дешифратор (Д), фотоприемники (ФП), носимый пульт управления (НПУ)
— для обеспечения дистанционного беспроводного управления по
инфракрасному каналу;
источник питания ИП36-5, блок аккумулятора (БА), блок преобразователя (БП)
— для обеспечения энергопитания.
Применяемость блоков (модулей) автоматизации комбайнов в различных
средствах автоматизации и очистных комбайнах приведена в табл. 1.1.
Таблица 1.1
В состав бортовой микро-ЭВМ, построенной на
элементах микропроцессор-шин набора КР580, входят: блок микропроцессора;
блок сопряжения, а также
блок преобразователя. Отдельные блоки бортовой микро-ЭВМ работают
следующим образом.
Блок микропроцессора (рис. 1.1) является функционально законченным
микроконтроллером. С его помощью реализуется алгоритм регулирования
нагрузки и скорости очистного комбайна. С генератора микросхемы D2)
поступают тактовые импульсы на центральный процессор D7
(рис. 1.2), который считает коды из микросхемы D3 —
постоянная память (ПЗУ). Микросхемы D5, D6 служат для хранения
промежуточных данных — ОЗУ. Микросхема D8 служит для буферирования шины
данных и формирования шины управления микроконтроллера (рис. 1.2).
Элемент D4 служит для дешифрации адресов при выборке микросхем ПЗУ и
ОЗУ. Аналогово-цифровой преобразователь D11 преобразует аналоговые
сигналы с датчиков, поступающие через коммутатор блока сопряжения в
соответствующие 8-разрядные коды, которые через порт В (РВО—РВ7)
микросхемы D10 поступают в центральный процессор D7.

Рис. 1.1. Принципиальная электрическая схема блока микропроцессора
Запуск аналогово-цифрового преобразователя D11 происходит под управлением программы с 4-го разряда порта С (РСЗ) микросхемы D10. Через порт А (РАО—РА7) микросхемы D10 происходит управление аналоговым коммутатором блока сопряжения ( 1—3-й разряды) и выдача кода неисправности в блок управления табло (5—8-й разряды). 1—3-й разряды порта С (РСО—РС7) выдают сигналы управления электрогидрораспределителям подачи и тормоза. По линиям 5 и 6-го разряда принимаются сигналы с реле времени, 3 и 6с— с блока сопряжения. Светодиод V2 светится при нормальной работе центрального процессора.

Рис. 1.3. Принципиальная электрическая схема блока сопряжения
Блок сопряжения (рис. 1.3) предназначен для согласования аналоговых
датчиков и электрогидрораспределителей с выходами (портами) блока
микропроцессора. На элементах D2.4 , D3, D4 выполнены реле времени на 3
и 6с. На элементах D7, VII —V16, V19— V21, V23—V31, R31—R42, R47—R48
собраны усилители управления электрогидрораспределителями подачи и
тормоза. Элементы V77, V22, V45, R46, С20, С21 обеспечивают снижение
тока, потребляемого электрогидрораспределителем тормоза после его
включения. Элементы R16—R19, R23, R24, СЗ,
С4, С12, С13 фильтруют сигналы с датчиков тока. Элементы R2, R4, 1/7, V8
обеспечивают однополупериодное выпрямление
сигналов с катушек датчика скорости. На элементах R3, R5, R6, R20, D1.1,
D2.1—D2.3, С7, СИ, V5 собран нуль-орган — одновибратор, формирующий
импульс в начале каждого периода переменного тока, поступающий на вход
запрос на прерывание блока микропроцессора. Элементы R8, R9, R12, R13,
R15, R21, R22, С1, С2, С5, С6, СЮ, V4, V6, V9 обеспечивают обработку
сигналов с задатчика скорости, термодатчика, о напряжении сети.
Обработанные сигналы с датчиков поступают на входы аналогового
коммутатора D5, управляет которым
блок микропроцессора через преобразователь уровня
D6. С выхода элемента 1)5 сигналы датчиков, разделенные во времени,
через повторители D1.2 поступают на вход аналого-цифрового
преобразователя в блоке микропроцессора.
Светодиоды VI, V2, V3 отображают информацию о наличии напряжения питания
+5, +12, —15 В, светодиоды V24, V27, V30 светятся при включении
лчектрогидрораспределителей подачи и тормоза. Светодиод V18 светится
прерывистым свечением при наличии импульсов с нуль-органа.
Блок п р е о б р а з о в а т е -л я (рис. 1.4) предназначен для
формирования питающих напряжении + 5, +12, —15, —5 В для блоков БМ, БС и
напряжения +15 В млн заряда аккумуляторов блоков Г>А На элементах LI,
С1—СЗ, R1, l\2, V3, V4, трансформаторе 77 со-оран генератор,
преобразующий постоянное напряжение 9 В в переменное частотой около 20
кГц.
С обмоток III, IV переменные напряжения поступают на мосты V8, V9, где
выпрямляются, сглаживаются конденсаторами С6—С10. На выходе формируется
ЩД напряжений: +12, +15, —5, —15 В. На элементах V16—V19, R10—R16,
СИ собран параметрический стабилизатор на 5 В. Резистор R15 является
органам регулировки выходного напряжения. Светодиод V14 отображает
наличие пходного напряжения 9 В, а диод V15—выходного напряжения 5 В. В
табл, I " даны параметры каналов БП.

Рис. 1.4. Принципиальная электрическая схема блока преобразователя
|
Таблица |
1.2 |
|
|
|
Канал |
Выходное напряжение, В |
Номинальный ток, А |
Пульсации, В |
|
+ 15В |
13,5 — 16,0 |
70 |
300 |
|
+ 12В |
10,5 — 12,5 |
70 |
100 |
|
— 15В |
14,0—15,5 |
50 |
100 |
|
— 5В |
4,25—5,75 |
10 |
250 |
|
+ 5 В |
4,95—5,05 |
650 |
30 |
Массовое внедрение в автоматику горных машин
современной микропроцессорной техники требует от электрослесарей, так же
как и от машинистов за- j бойных и проходческих машин, обстоятельного
знакомства с ней. Завершая I данную главу, рекомендуем перечень
использованной литературы:
1. Балашов Е. П., Пузанков Д. В. Микропроцессоры и микропроцессорные
системы.—М.: Радио и связь, 1981.— 326 с.
2. Васенков А. А., Шахнов В. А., Малашевич Б. М. Микропроцессорные
интегральные схемы — основа ЭВМ четвертого поколения // Микроэлектроника
и полупроводниковые приборы / Под ред. А. А. Васенкова и Я. А.
Федотова.—j М.: Сов. радио, 1979.—Вып. 4.—С. 3—17.
3. Мухопад Ю. Ф. Структурное проектирование специализированных мик-
роэлектронных вычислителей: Обзоры по электронной технике. — М.: ЦНИИ
Электроника, 1979.—Вып. 3.—С. 80.
4. Клингман Э. Проектирование микропроцессорных систем / Пер. с англ.
канд. техн. наук В. А. Балыбердиной, В. А. Зинченко; Под ред. д-ра
техн.наук
С. Д. Пашкеева,—М.: Мир, 1980.— 575 с.
5. Справочник по микропроцессорным устройствам/ А. А. Молчанов,
В. И. Корнейчук, В. П. Тарасенко, Д. А. Россошинский.— К.: Техшка,
1987,— 288 с.
содержание .. 1 2 3 4 5 6 7 8 9 10 ..